MAVGraph
MAVGraph can graph any of the flight data. The commands are exactly the same as the graph module in MAVProxy.
Usage:
mavgraph.py [-h] [--no-timestamps] [--planner] [--condition CONDITION]
[--labels LABELS] [--legend LEGEND] [--legend2 LEGEND2]
[--marker MARKER] [--linestyle LINESTYLE] [--xaxis XAXIS]
[--multi] [--zero-time-base] [--flightmode FLIGHTMODE]
[--output OUTPUT]
<LOG or FIELD> [<LOG or FIELD> ...]
Positional arguments:
<LOG or FIELD>
Optional arguments:
-h, --help show this help message and exit
--no-timestamps Log doesn't have timestamps
--planner use planner file format
--condition CONDITION
select packets by a condition
--labels LABELS comma separated field labels
--legend LEGEND default legend position
--legend2 LEGEND2 default legend2 position
--marker MARKER point marker
--linestyle LINESTYLE
line style
--xaxis XAXIS X axis expression
--multi multiple files with same colours
--zero-time-base use Z time base for DF logs
--flightmode FLIGHTMODE
Choose the plot background according to the active
flight mode of the specified type, e.g.
--flightmode=apm for ArduPilot or --flightmode=px4 for
PX4 stack logs. Cannot be specified with --xaxis.
--output OUTPUT provide an output format
Example:
mavgraph.py 1.BIN "CTUN.BarAlt" "CTUN.Alt" "CTUN.DAlt"
Flags
--flightmode
This flag allows to show the different flight modes. The background of the graph changes depending on the flight mode. Here you can see the color code:
'MANUAL' : (1.0, 0, 0), -> red
'AUTO' : ( 0, 1.0, 0), -> green
'LOITER' : ( 0, 0, 1.0), -> blue
'FBWA' : (1.0, 0.5, 0), -> orange
'RTL' : ( 1, 0, 0.5), -> pink
'STABILIZE' : (0.5, 1.0, 0), -> chartreuse (green like)
'LAND' : ( 0, 1.0, 0.5), -> mediumspringgreen
'STEERING' : (0.5, 0, 1.0), -> violet
'HOLD' : ( 0, 0.5, 1.0), -> royalblue
'ALT_HOLD' : (1.0, 0.5, 0.5), -> lightcoral (soft red)
'CIRCLE' : (0.5, 1.0, 0.5), -> palegreen
'POSITION' : (1.0, 0.0, 1.0), -> magenta
'GUIDED' : (0.5, 0.5, 1.0), -> lightslateblue (kind of like purple)
'ACRO' : (1.0, 1.0, 0), -> yellow
'CRUISE' : ( 0, 1.0, 1.0) -> turquoise
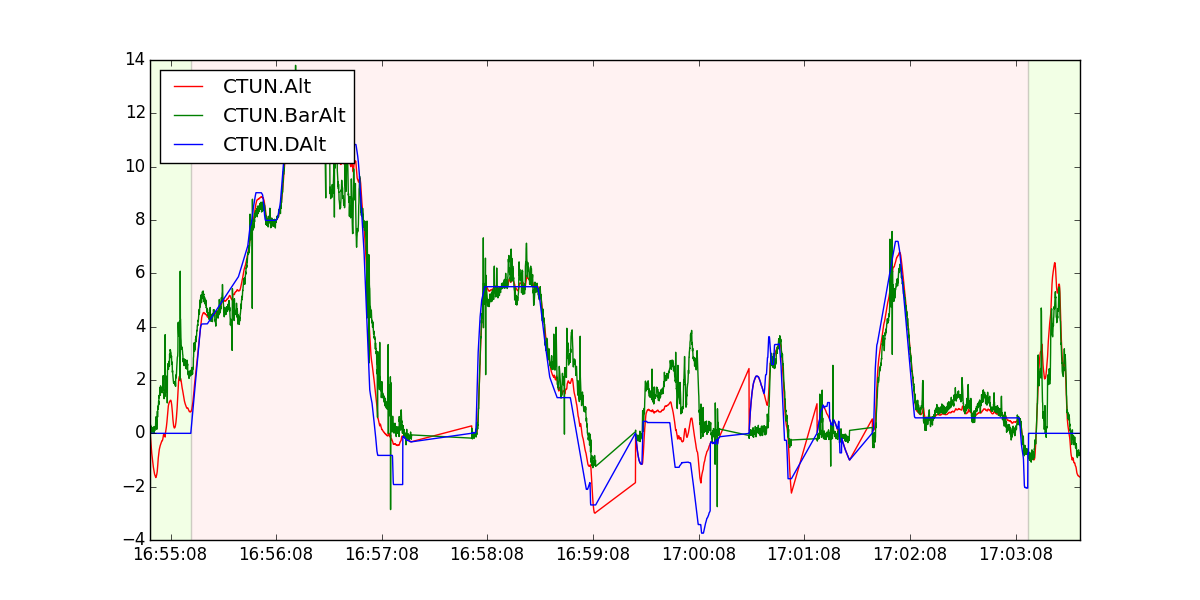
In the following graph It's possible to see two different colors. when the background color is green represents the stabilize mode (at the beginning and in the end of the graph, the copter takes off and lands). When the background is red the copter is in altitude hold mode. You can check the color with the description above.