- Erle Robotics: Erle-copter
- Introducción
- 1. Hardware
- 2. Software
- 3. Modos de vuelo
Eligiendo una estación de control en tierra
Hay al menos 7 estaciones de control en tierra diferentes (Mission Planner, APM Planner2, MAVProxy, DroidPlanner, AndroPilot, MAVPilot and QGroundControl) que se pueden utilizar para comunicarte con ArduPilot (es decir, ArduCopter, ArduPlane y ArduRover) Esta página hace un revisión general y proporciona enlaces para que tomes la elección más apropiada.
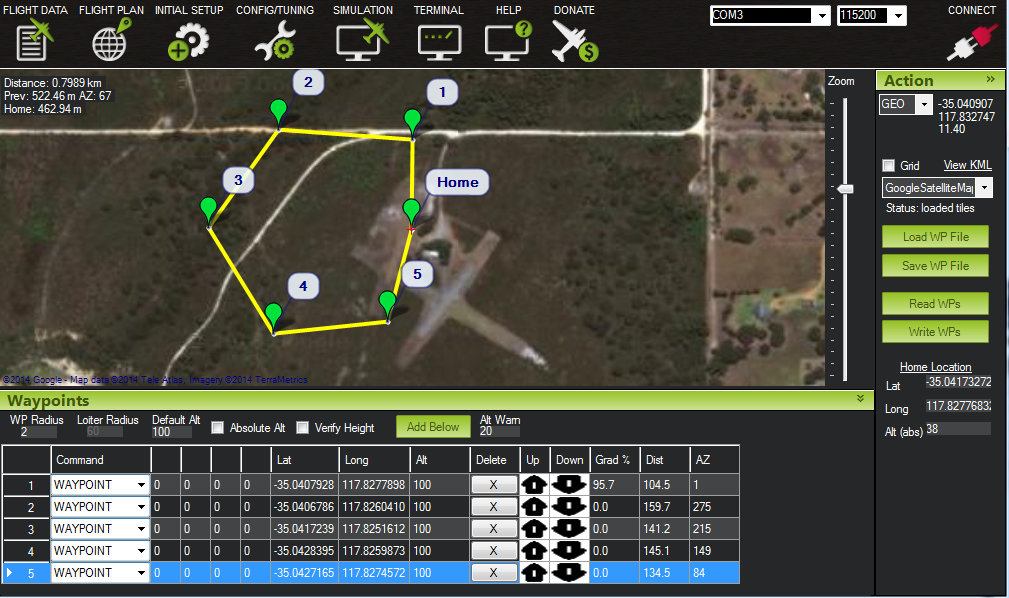
Mission Planner
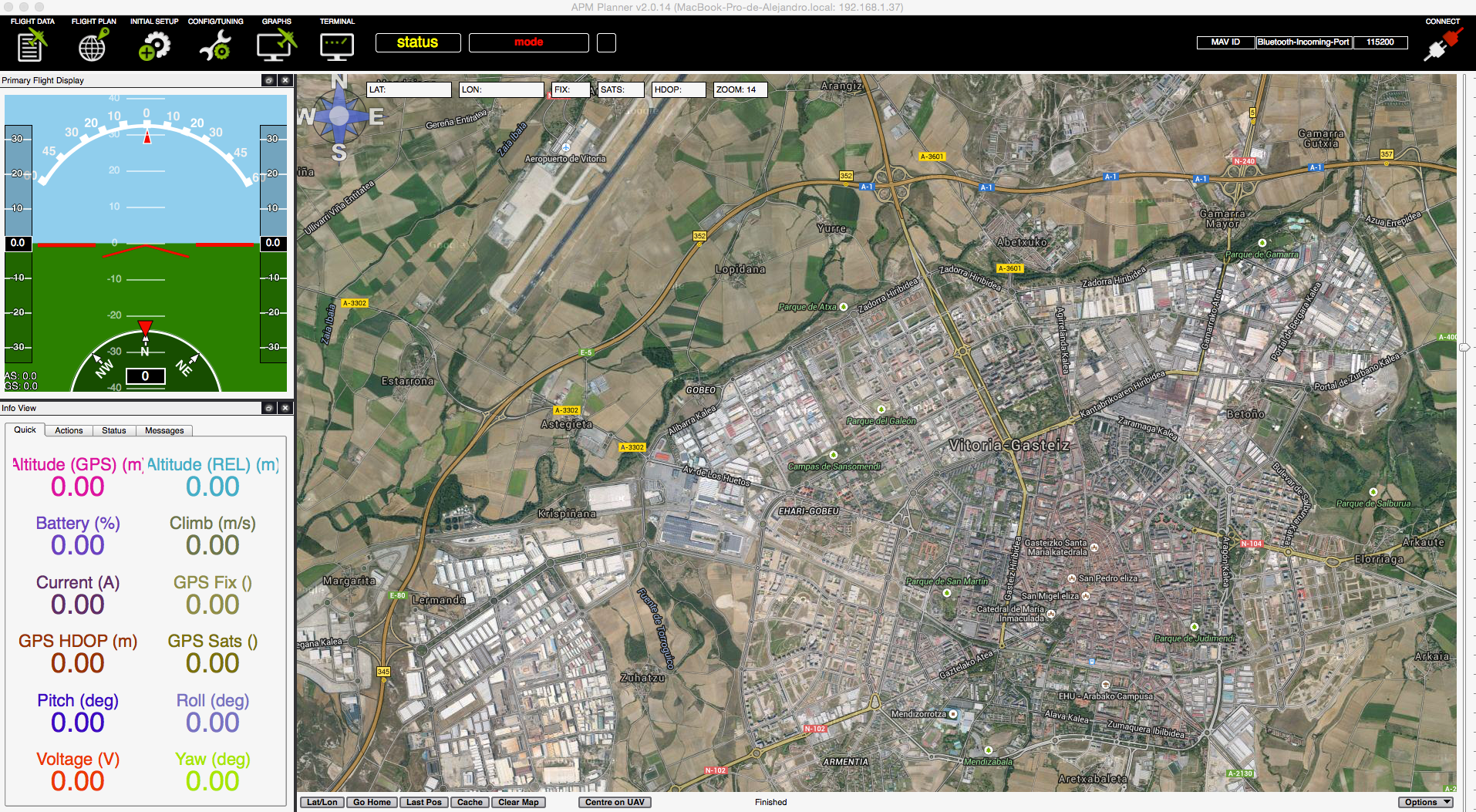
APM Planner 2
MAVProxy
MAVProxy es una estación de control en tierra para UAV con total funcionalidad. La intención es ser minimalista, portable y estensible para soporta cualquier protocolo MAVLink (como APM).
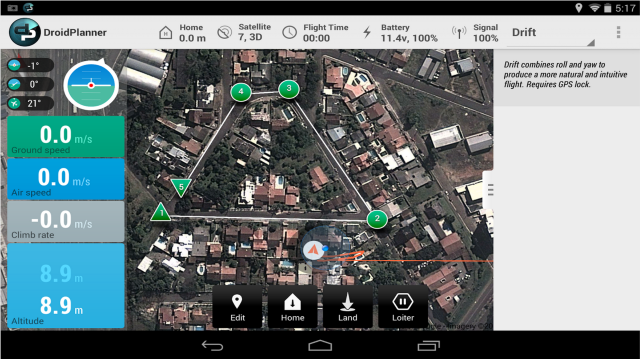
DroidPlanner
DroidPlanner es una estación de control en tierra para Android que ejecuten el software de Ardupilot.
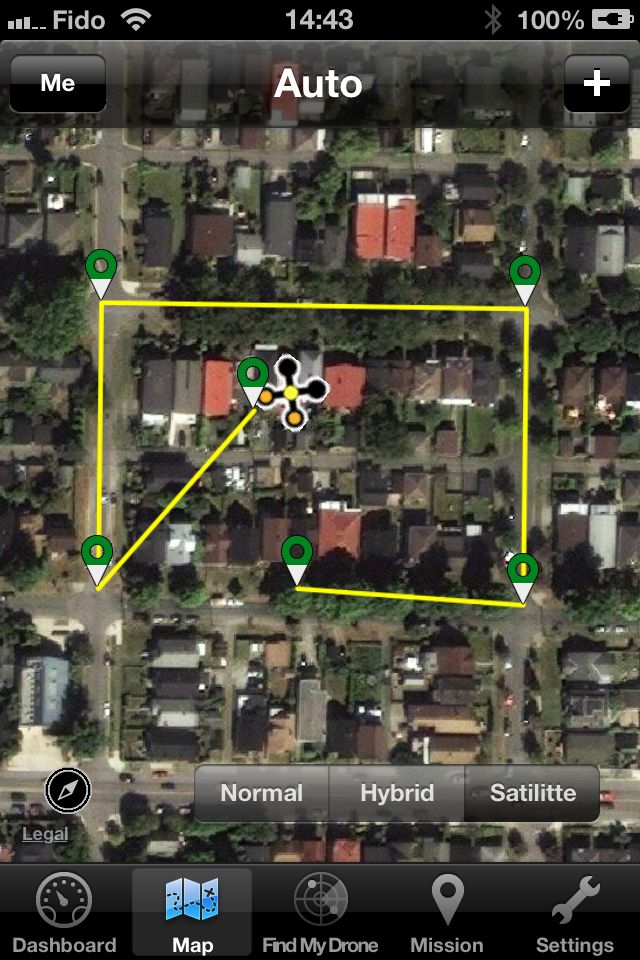
AndroPilot

MAVPilot for iPhone
Estación de control en tierra para el bolsillo. Su público objetivo son los usuarios de iPhone (la versión para iPad llegará mas tarde). Los pilotos vuelen a menudo solos y esto puede hacer dificil el uso de un ordenador portatil al mismo tiempo. Esto es más complicado cuando el piloto un modo semi-automático como ALT_HOLD. Usando el iPhone en lugar de un portátil es una gran manera de mantener la concentración en la MAC y aún así tener toda la información útil es su alcance. Con apoyo integrado de voz le hará saber al instante el estado de su MAV.
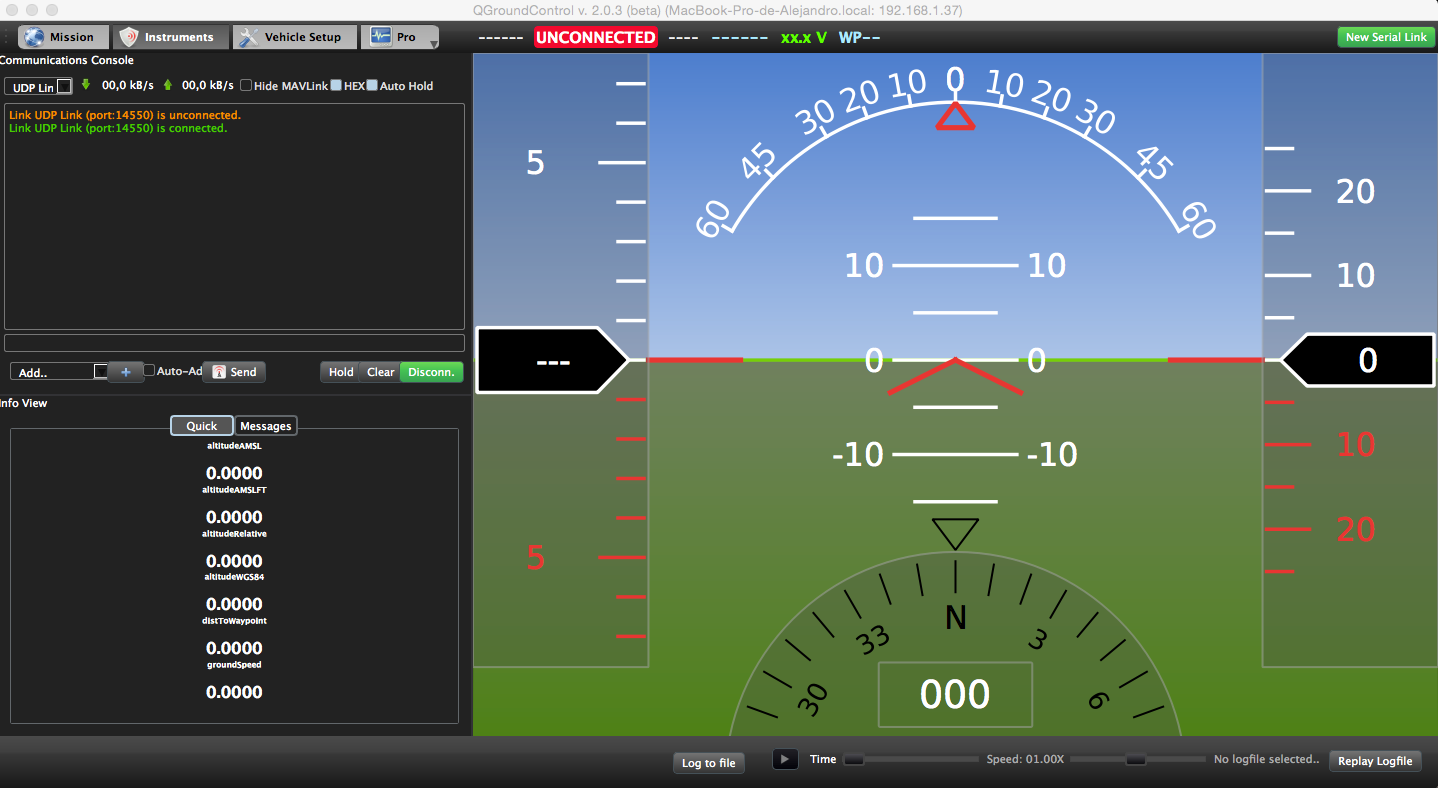
QGroundControl
QGroundControl esta basado en la estación de control de PIXHAWK y ahora esta siendo desarrollado por el esfuerzo de la comunidad.
El protocolo principal de GroundControl es MAVLink, binario, protocolo serie que permite recibir a través de UDP o un enlace serie. La documentación completa se puede encontrar en: MAVLink Micro Air Vehicle Communication Protocol.