- Erle Robotics: Erle-copter
- Introducción
- 1. Hardware
- 2. Software
- 3. Modos de vuelo
Calibración del radiocontrol
http://copter.ardupilot.com/wiki/initial-setup/configuring-hardware/#Calibrate_radio_control
Enciende el radiocontrol. Verifica que el transmisor está conectado con el multicóptero y los joysticks estén en su sitio.
Modos
- Modo 1: El stick izquierdo controlará el pitch y yaw. El stick derecho controlará el throttle y el roll
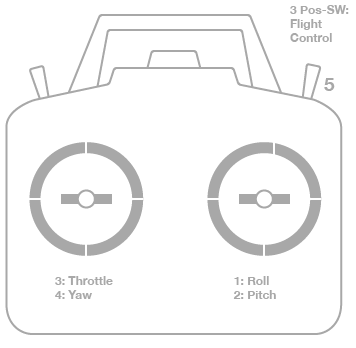
- Modo 2: El stick izquierdo puede controlar el throttle y yaw. El stick derecho controlará el pitch y el roll.
Para cualquier tipo de transmisor, el interruptor de 3 posiciones debe estar conectado al canal 5 para controlar los distintos modos de vuelo.
Opcionalmente el canal 6 del transmisor puede ser configurado para realizar ajustes durante el vuelo. El canal 7 y 8 se pueden utilizar para el control de funciones auxiliares. Por ejemplo, para controlar el gimbal.
Mueve las palancas de control y los interruptores de su transmisor a los límites de recorrido. Su transmisor debe realizar los siguiente cambios:
- Canal 1: low = izquierda roll , high = derecha roll.
- Canal 2: low = pitch arriba, high=pitch abajo back.
- Canal 3: low = throttle abajo (off), high = throttle arriba.
- Canal 4: low = izquierda yaw, high = derecha yaw.