Land
LAND mode attempts to bring the copter straight down.
- Descends to 10 meters (or until the sonar senses something below the copter) using the regular Altitude Hold controller which will descend at the speed held in the
WPNAV_SPEED_DNparameter which can be modified - Below 10 meters the copter should descend at the rate specified in the
LAND_SPEEDparameter which defaults to 50cm/s. - Upon reaching the ground the copter will automatically shut-down the motors and disarm the copter if the pilot’s throttle is at minimum.
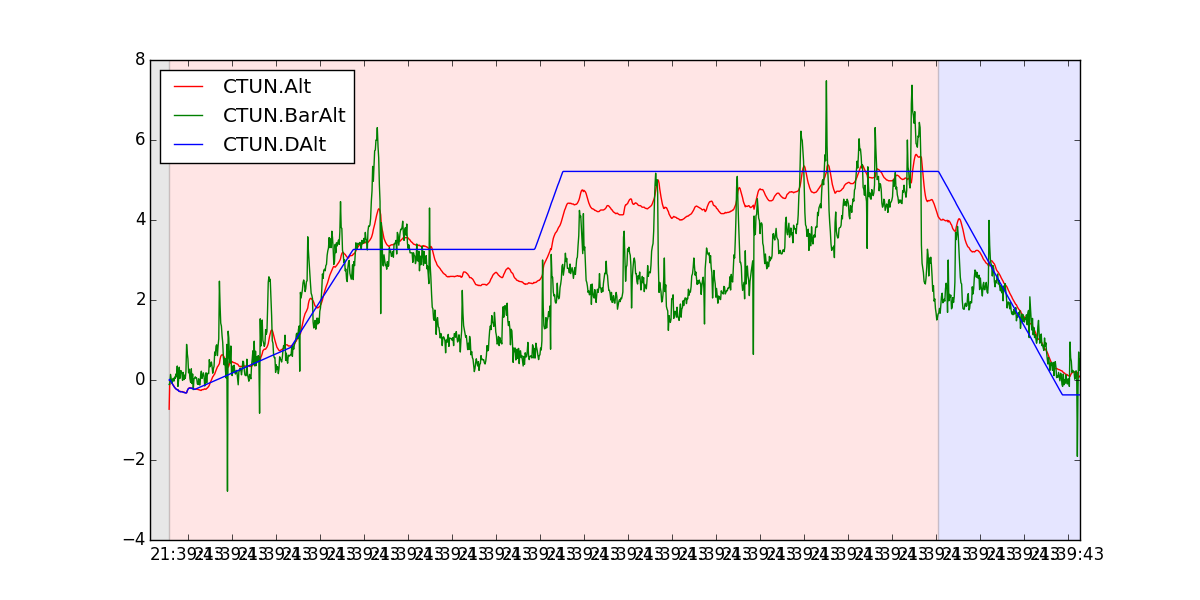
In the following graph you can see the behaviour of the landing mode. When the background is red the copter is flying in altitude hold mode and the blue background means the robot is landing. The blue line represents the desired altitude. When the landing mode starts the desire altitude start to descend.
NOTES:
- If the vehicle does not have GPS lock the horizontal control will be as in stabilize mode so the pilot can control the roll and pitch lean angle of the copter.
- If the vehicle has GPS lock the landing controller will attempt to control it’s horizontal position but the pilot can adjust the target horizontal position just as in Loiter mode.
Warning!
In any Alt Hold based mode. If your copters operation becomes erratic when you are close to the ground or landing you probably have the fight controller situated such that it’s barometer (altimeter) is being affected by the pressure created by the copters prop-wash against the ground.
- This is easily verified by looking at the Altimeter reading in your logs and seeing if it spikes or oscillates when near the ground.
- If this is a problem, move the flight controller out of prop wash effect or shield it with an appropriately ventilated enclosure. Success can be verified by flight test and by log results.