Failsafe
A fail-safe or fail-secure device is one that, in the event of a specific type of failure,
responds in a way that will cause no harm, or at least a minimum of harm, to other devices or
danger to personnel.
Taking this definition as a start point, drones, obviously, also needs security measurements. You could configure Erle-Copter to enable failsafes. In this section, we will explain how to activate some of them (the most meaningful ones). For more info check this site.
Note: As user might not have GPS, this section will show how to setup failsafes using land mode
Radio Failsafe
Erle-Copter supports Return-To-Launch/Land in cases where contact between the Pilot’s RC transmitter and the flight controller’s receiver is lost.
When the failsafe will trigger
If enabled and set-up correctly the radio failsafe will trigger if:
- The pilot turns off the RC transmitter
- The vehicle travels outside of RC range (usually at around 500m ~ 700m)
- The receiver loses power (unlikely)
- The wires connecting the receiver to the flight controller are broken (unlikely).
Set-up for No-Signal method
Follow the next steps to enable it:
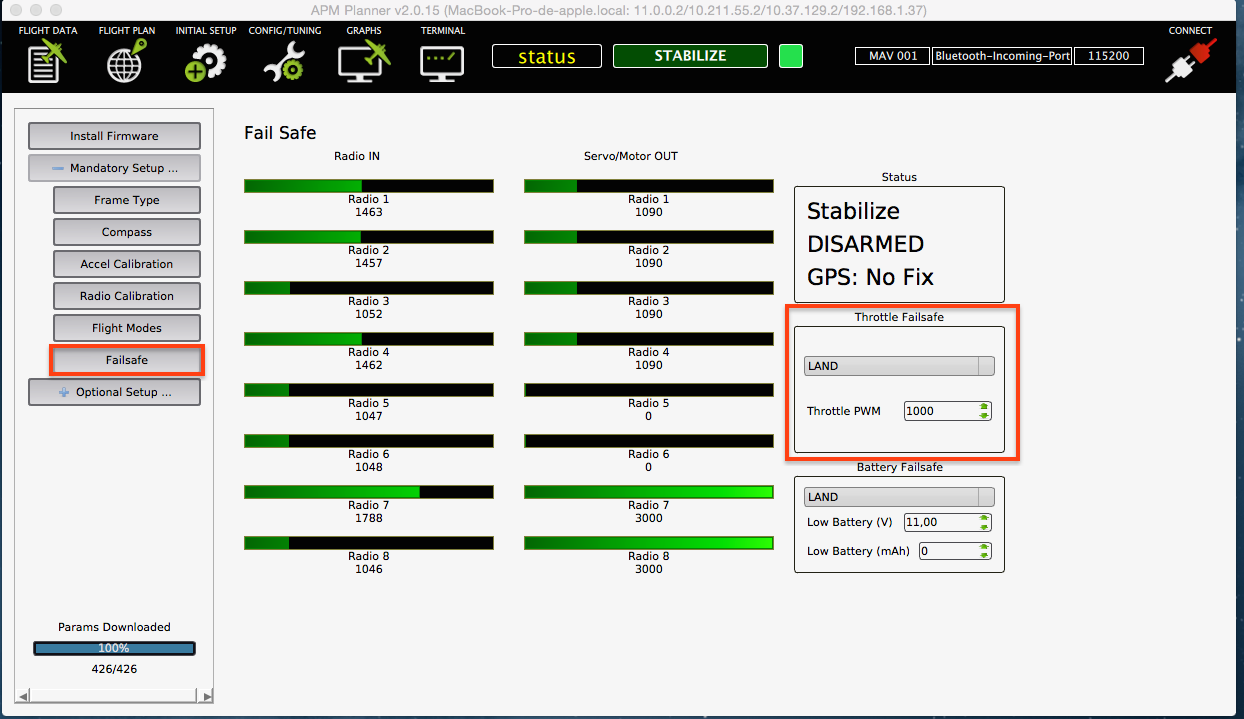
- Power Erle-Copter up and connect to the mission planner and select Initial Setup >> Mandatory Hardware >> Failsafe.
- Set the Throttle Failsafe Option to LAND to force the vehicle to Land immediately if it loses RC contact. Because the throttle is not pulled low, there is no need to set the “FS Pwm” value.
Testing
Make the next tests in order to verify is working fine:
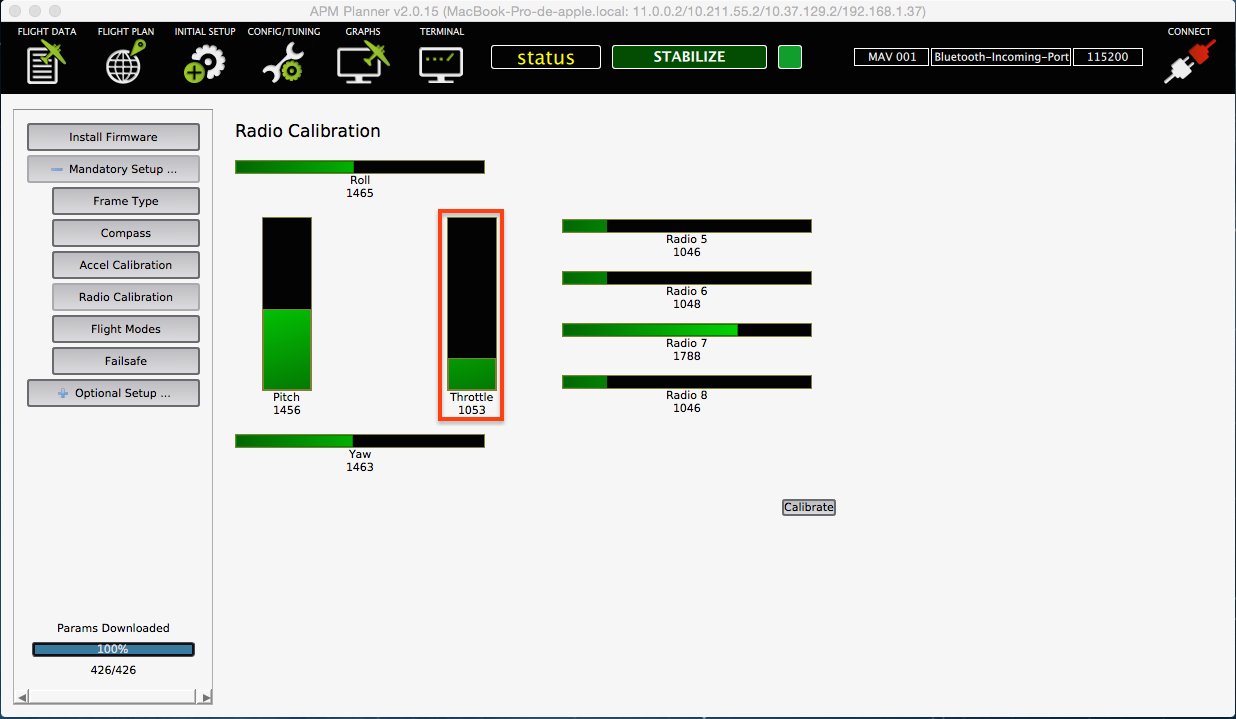
- Ensure the minimum value of the RC and RC off PWM value are different: Turn on the RC with the throttle to the minimum, enter into the RC calibration window and check the value:
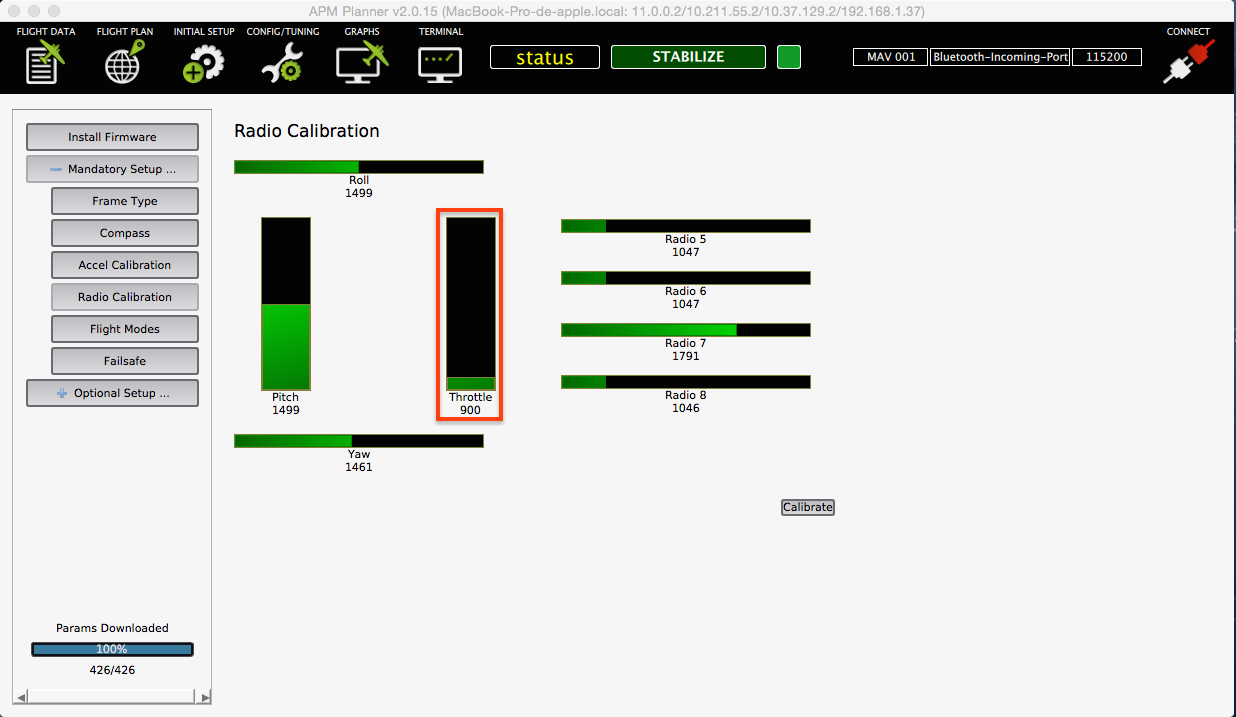
Now turn off the RC and check that the value descends:
Switch to stabilize mode, arm your motors but keep your throttle at zero. Turn off your transmitter. The motors should disarm immediately (red led will start flashing, DISARMED will be displayed in the Mission Planner’s Flight Data screen).
Switch to stabilize mode, arm your motors and raise your throttle to the mid point. Turn off your transmitter. The Flight Mode should switch to LAND.
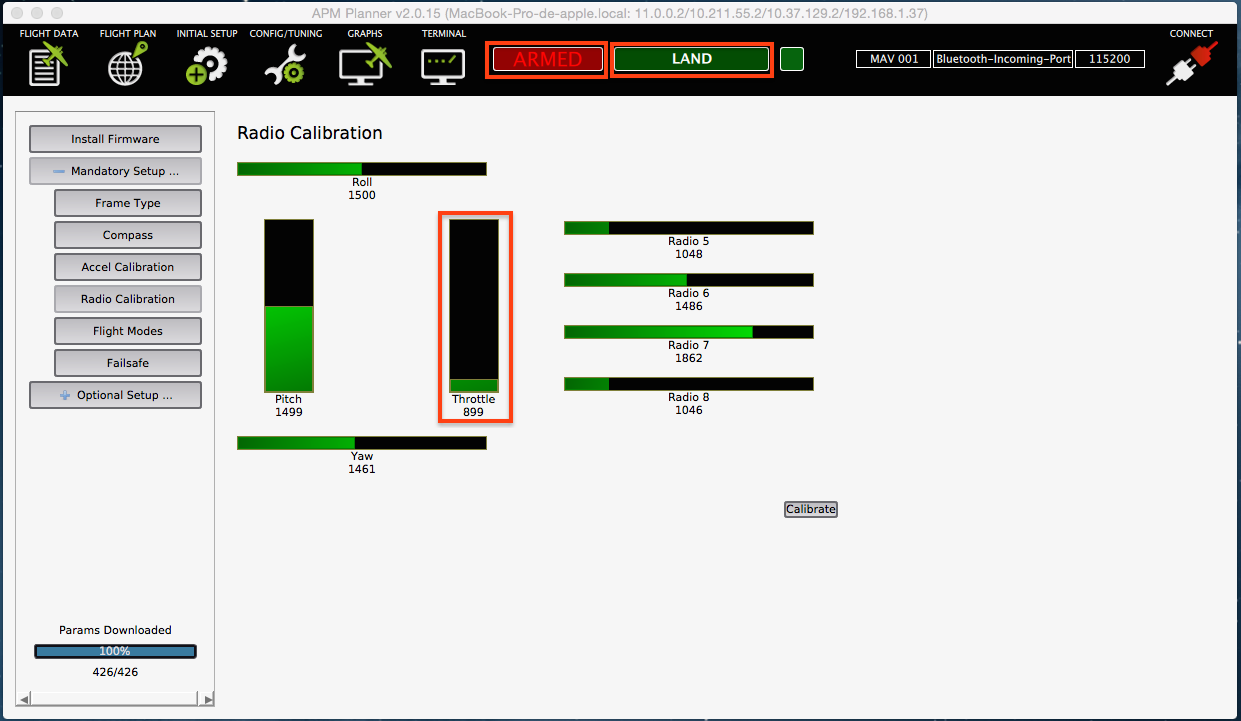
Notice that the value of the throttle is lower than the minimum value (~1053) when the RC is on and that Erle-Copter has changed to Land mode.
Battery Failsafe
Erle-Copter supports the activation of Battery based failsafe. Our Power Module enables battery monitoring. Right now (19-03-2015), battery voltage reading is supported in the latest Autopilot. Download the latest binaries from our repository!
Thanks to this reading, the user could know the battery voltage using a GCS.
This failsafe permits to you to minimize the risks of having a sudden death of Erle-Copter and enables a better use of your LiPo batteries.
When the failsafe will trigger
If enabled and set-up correctly the battery failsafe will trigger if battery voltage drops below the threshold voltage determined (10.5v by default).
Also notice that if you try to arm Erle-Copter having a lower battery voltage than the trigger threshold one, an low battery error will show up (in the GCS in case you are using it).
Battery Failsafe set-up
Note: The use of a voltage sensing Power Module is mandatory!
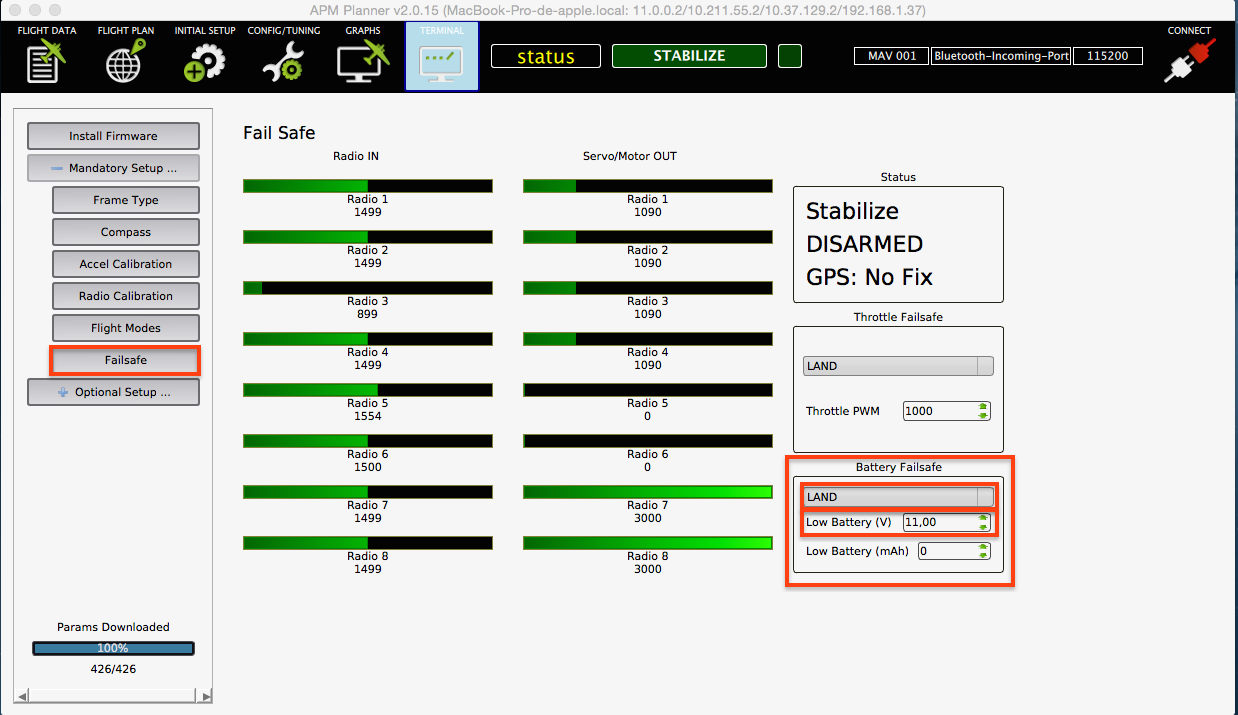
- Power Erle-Copter up and connect to the mission planner and select Initial Setup >> Mandatory Hardware >> Failsafe.
- In the Battery Failsafe square, select LAND as the flgiht mode and set the voltage which you would like to trigger the failsafe (10.5~11v recommended).
Note: We are working on having current measurement, this will be used to establish current based failsafe.
Testing
Once you have activated the failsafe, you could check that you cannot arm Erle-Copter. Follow the next steps:
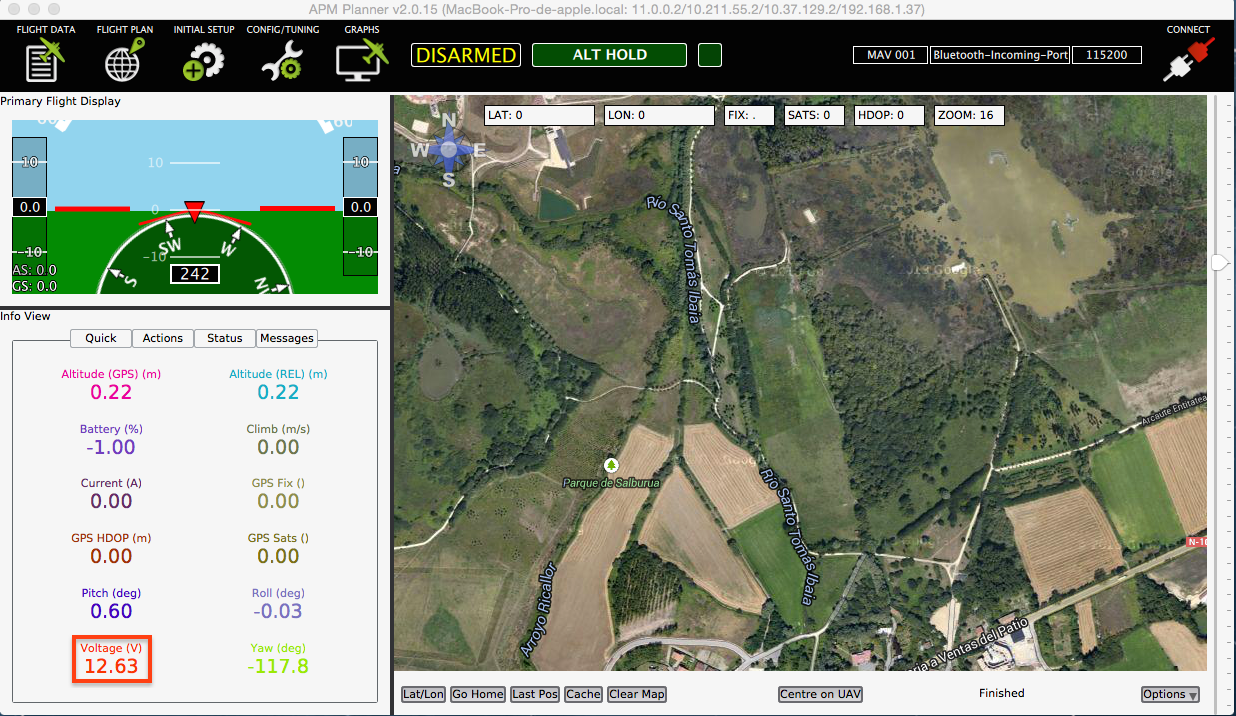
- Power Erle-Copter up and connect to a GCS.
- Check the voltage in Info View.
- In the Battery failsafe tab, set the Low battery voltage higher than the voltage remaining.
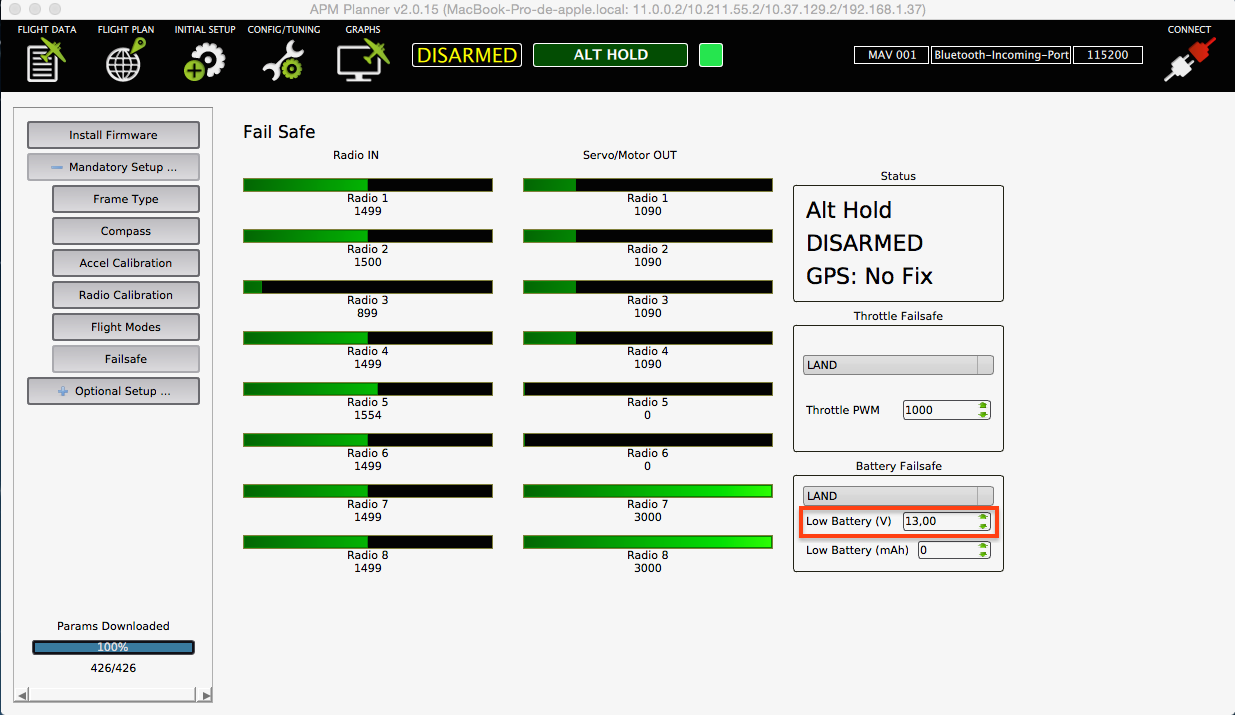
- Finally, try to arm Erle-Copter. Low battery error should show up.
Don't forget to restore desired low battery voltage value again!