Assembly of Erle-copter
The following content will explain how to fully assembly Erle-copter.
Erle-copter is shipped mounted. The following guide provides a step-by-step walkthrough on how to build your own copter using Erle-brain
Index
- Material needed
- Soldering the speed controllers
- Mounting the copter core
- Mounting the motors
- Battery holder assembly
- Mounting the upper frame
- Mounting the autopilot
- Holding the ESCs
- Connecting everything to the autopilot

Material needed

In order to make a minimum flying vehicle you'll need at least:
- Frame
- Motors
- Speed controllers
- Self-tightening propellers, normal propellers or carbon fiber self-tightening propeller
- Erle-brain
- Power module
- Battery
- Radio Control method (either traditional 2.4 GHz radio frequency controller or alternatives such as rc-override using WiFi, Bluetooth, etc.)
- Buzzer
For safety precautions, at Erle Robotics, we recommend the use of a dedicated RC transmitter (+ controller) and receiver.
Besides the minimum set of requirements to get a flyable vehicle, the different flight modes might require extra sensors/actuators. Here're some of them:
- Telemetry (either a dedicated RF link or through WiFi)
- GPS
- external sensors such as compass, barometers, etc.
- additional legs
- ...
All these components are available through the Erle Robotics store, either through kits or individually.
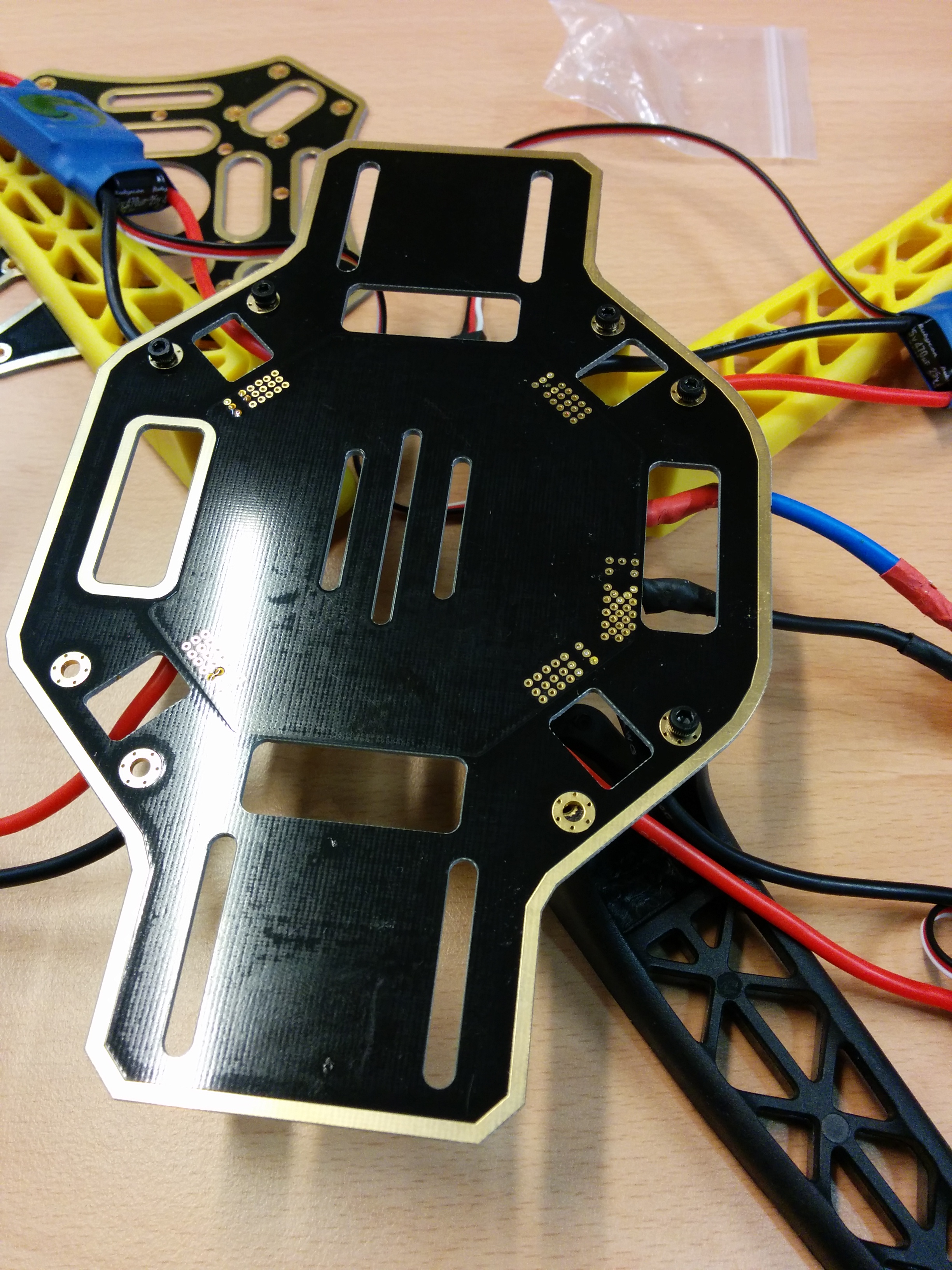
Soldering the speed controllers
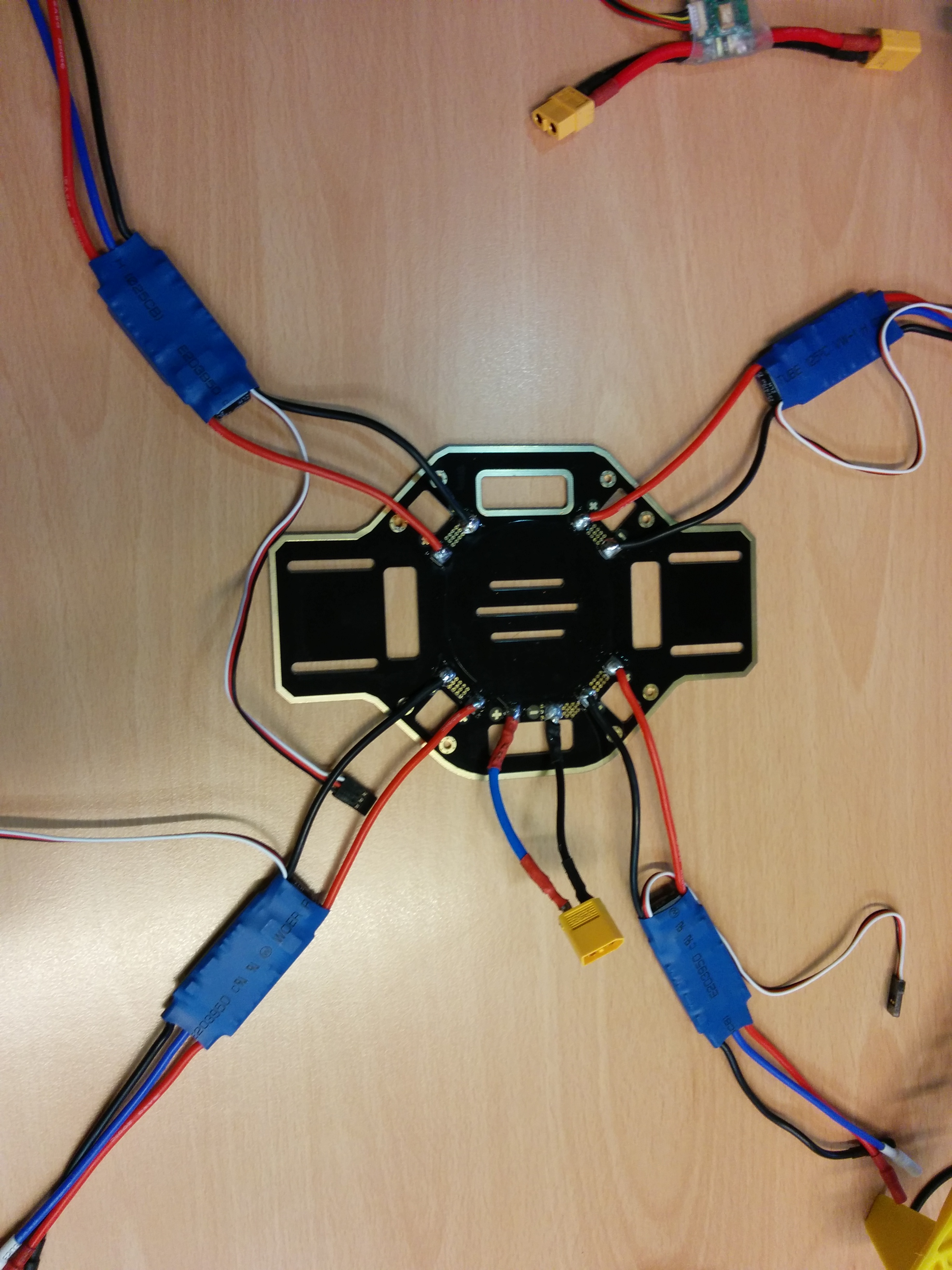
The Electronic Speed Controllers (ESCs) allow the hardware autopilot (Erle-brain in this scenario) to interface with the motors appropriately taking care of converting the PWM logic that the autopilot transmits into rotation speeds on the motors. The ESCs are directly soldered into the base of Erle-copter which avoids using additional cables.
Besides soldering the ESCs we also add a XT-60 male connector that will be used for the Power Module.
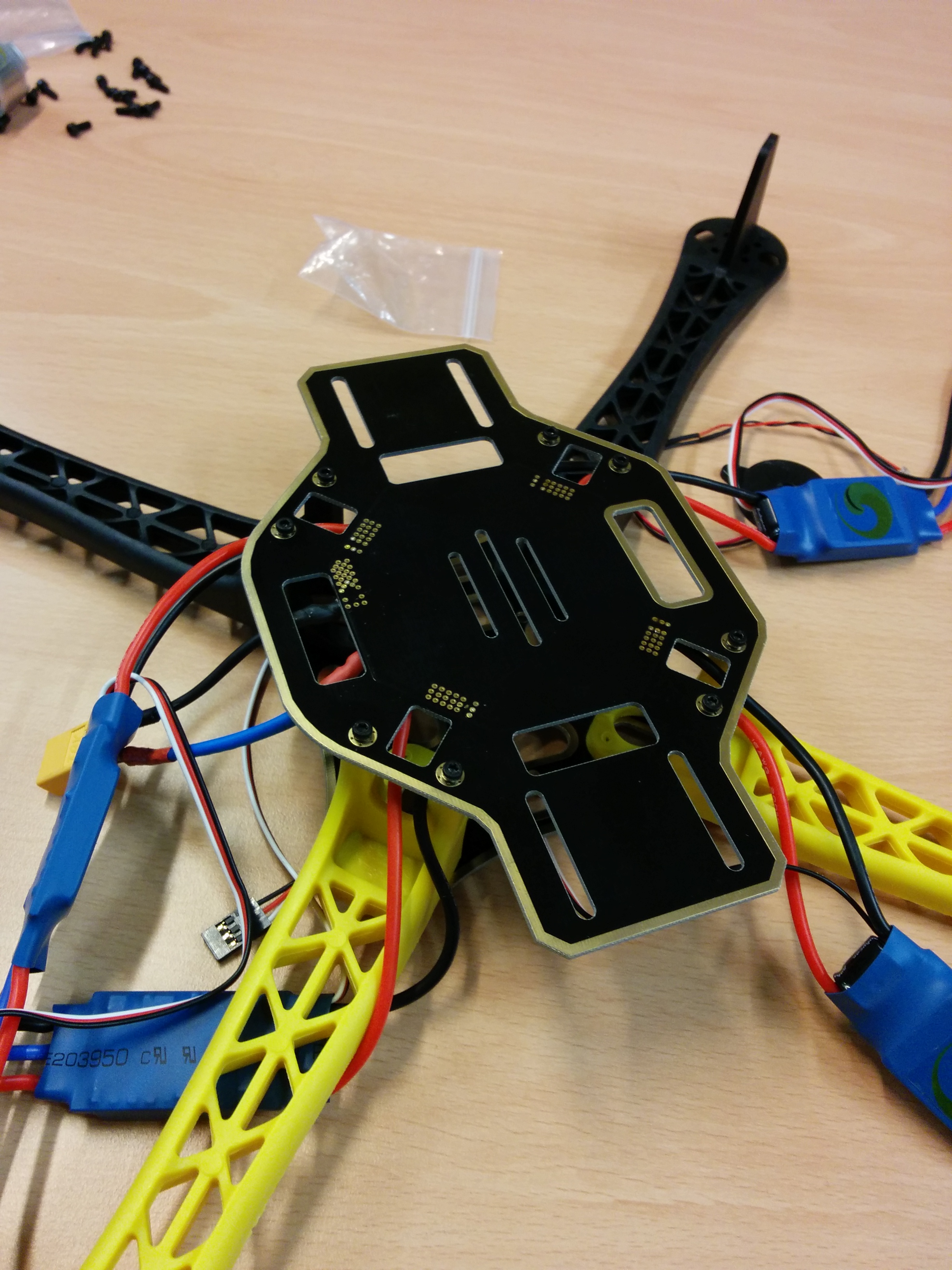
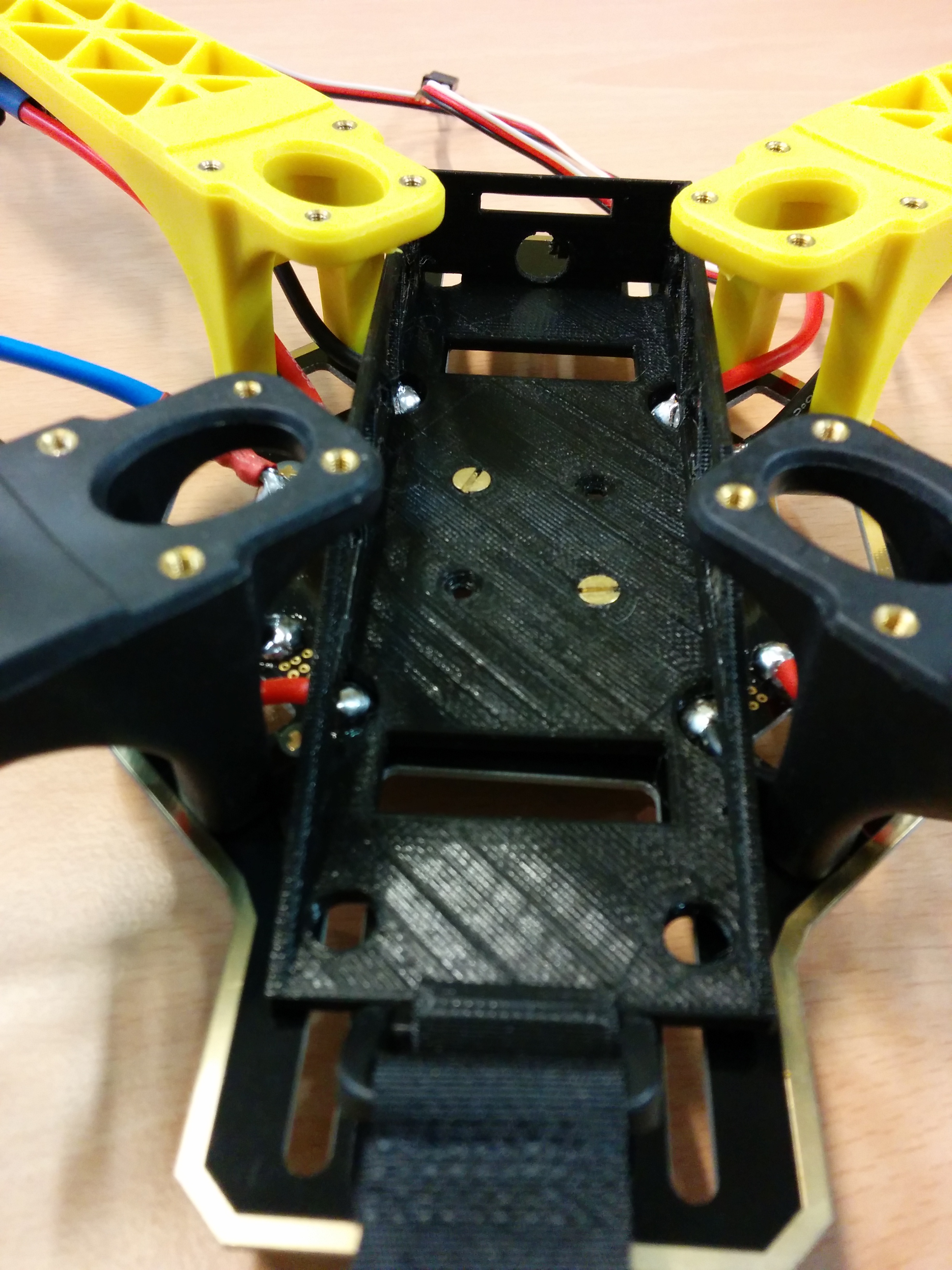
Mounting the copter core
NOTE: We'd recommend you to use yellow legs for the front and black legs for the back of the copter. This will help you identify the position of your copter while flying.
Once the ESCs and the XT-60 connector have been soldered, you should screw the legs to the base board
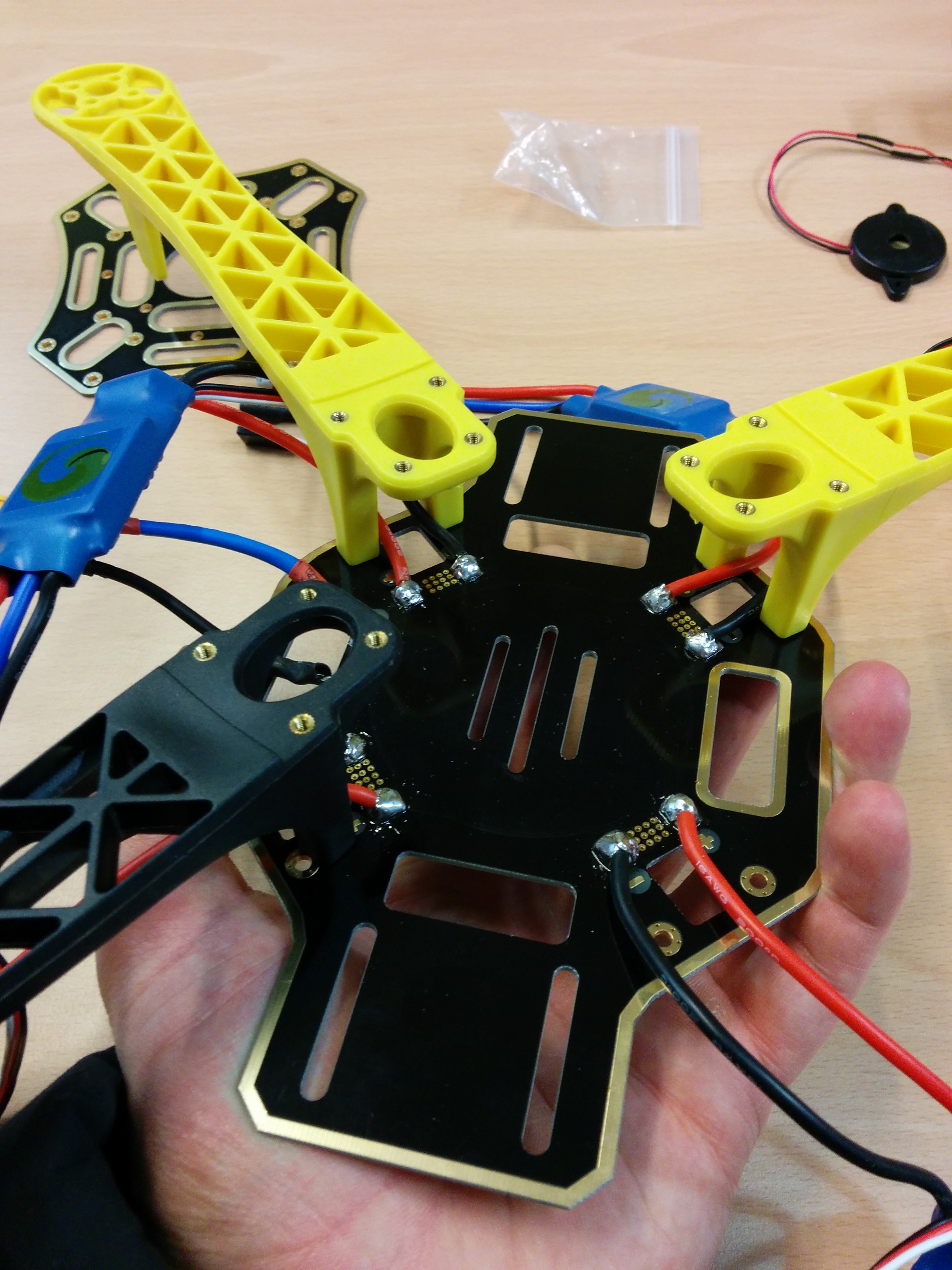
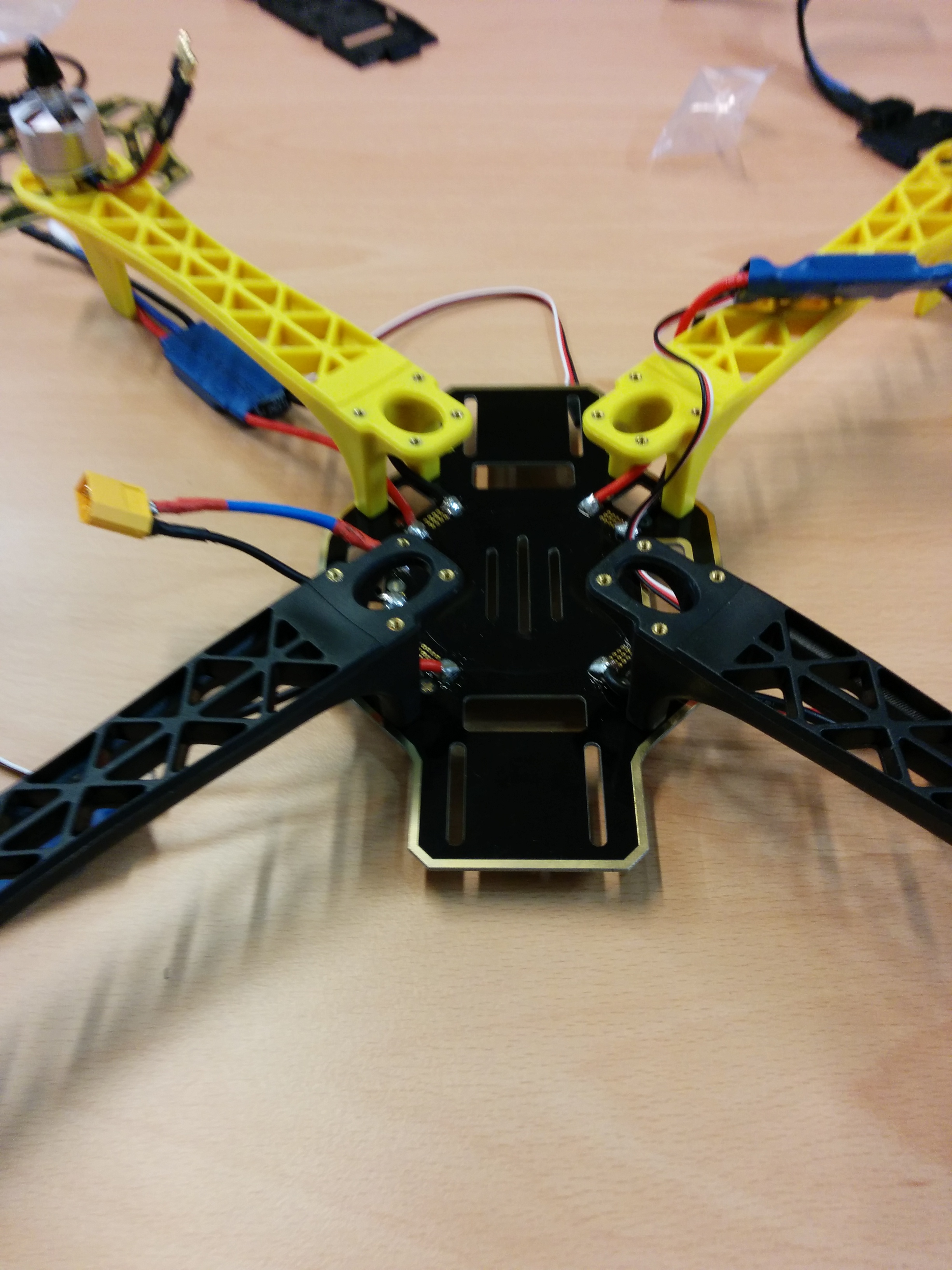
Additionally, you could add separators between the legs and the bottom frame to increase the available space (e.g.: add thicker batteries, place components inside, etc)
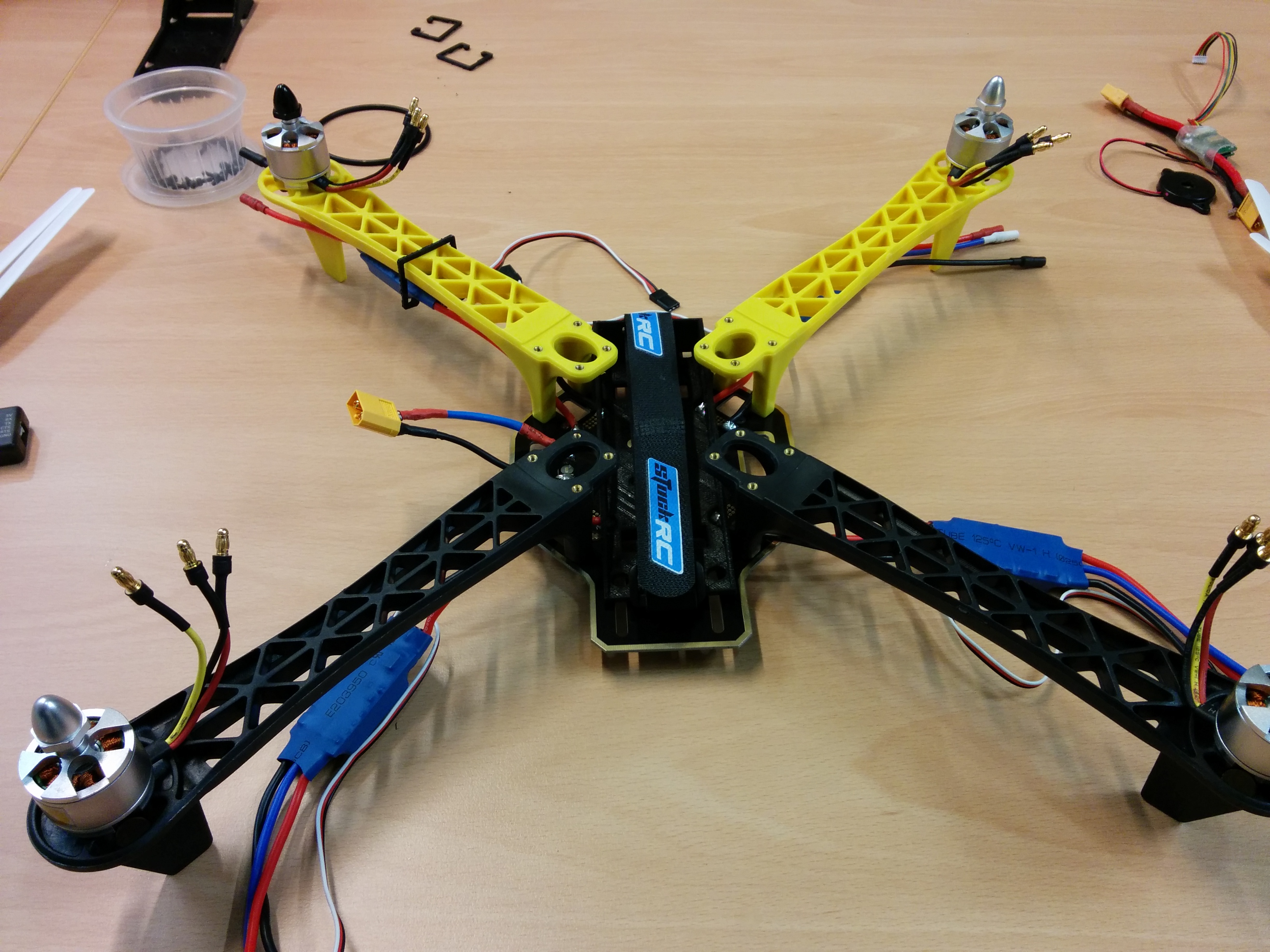
Mounting the motors
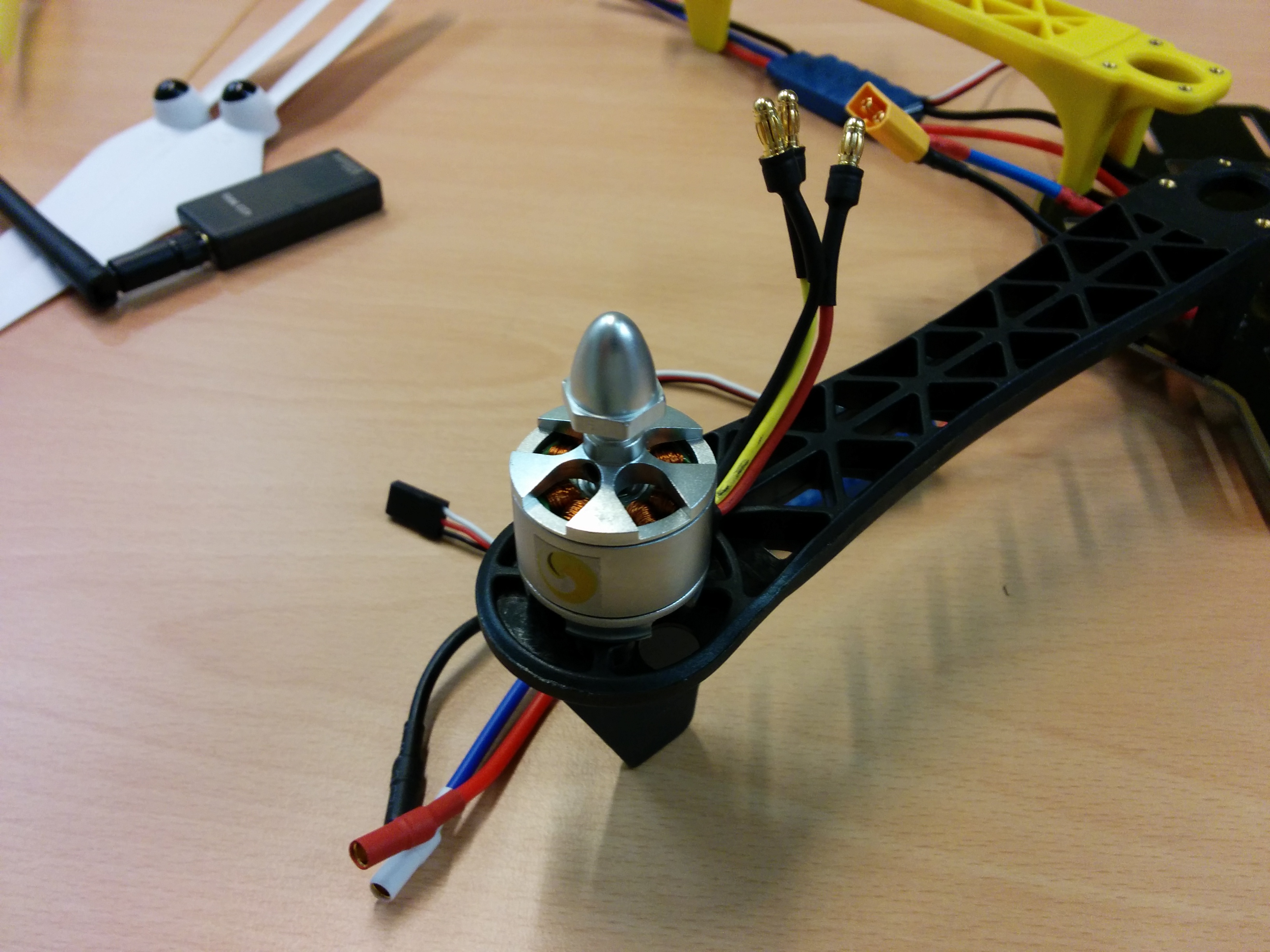
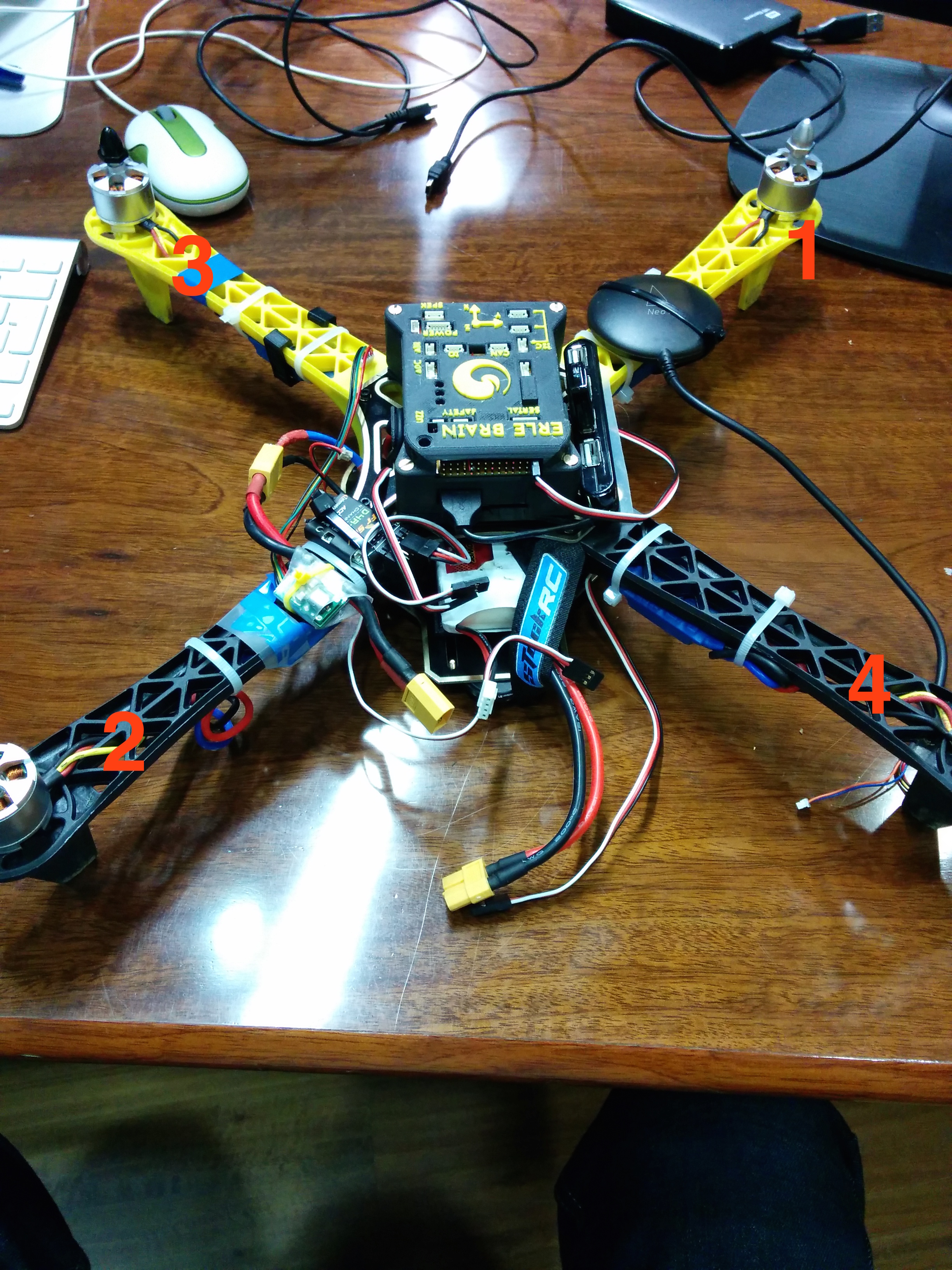
Mount the motors at the end of the copter legs use 4 screws for each motor to fix them.
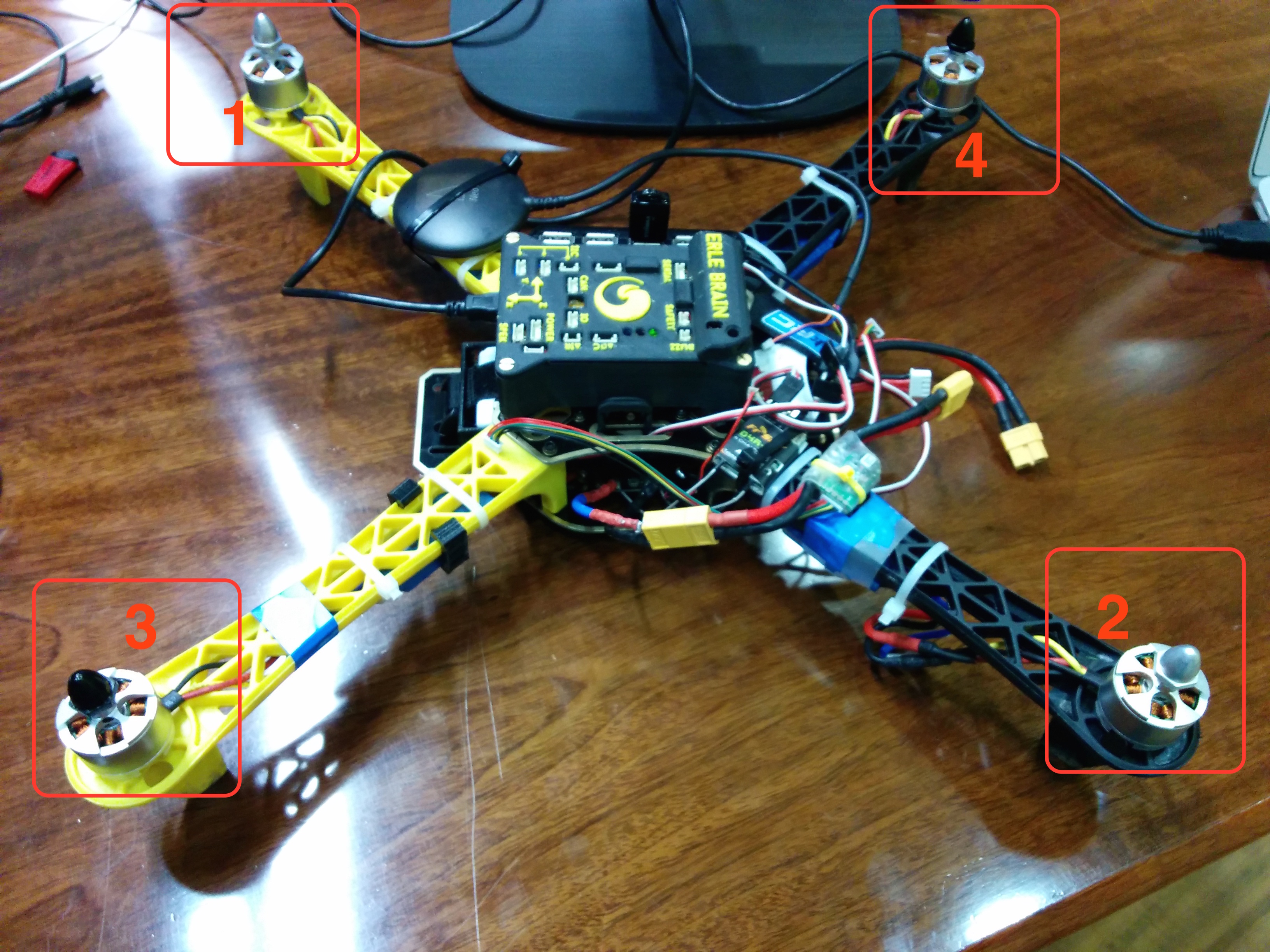
NOTE: Depending on what kind of motor/propellers you use, there might be clockwise and counterclockwise motors. Refer to the following picture for the motor ordering number:
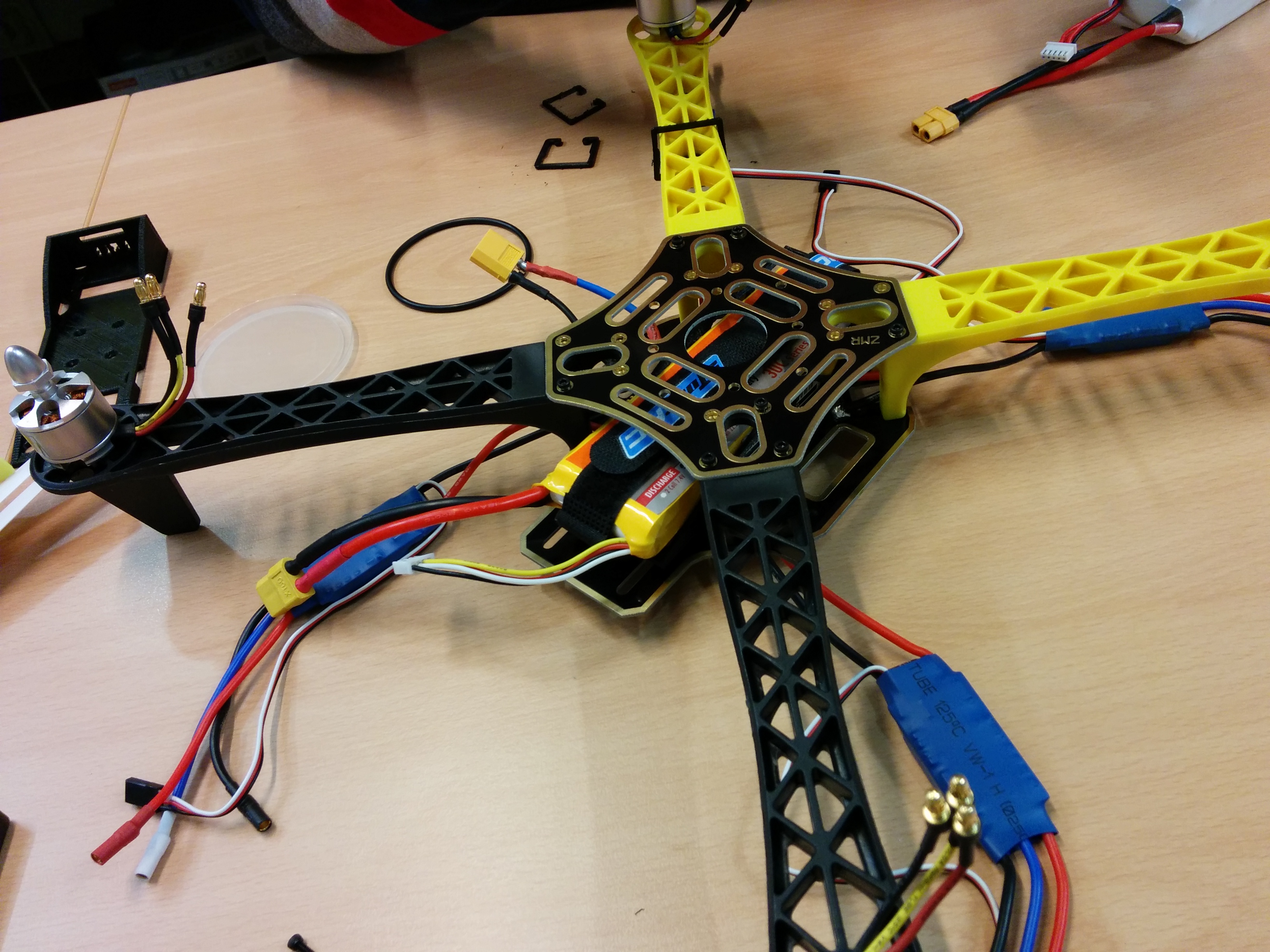
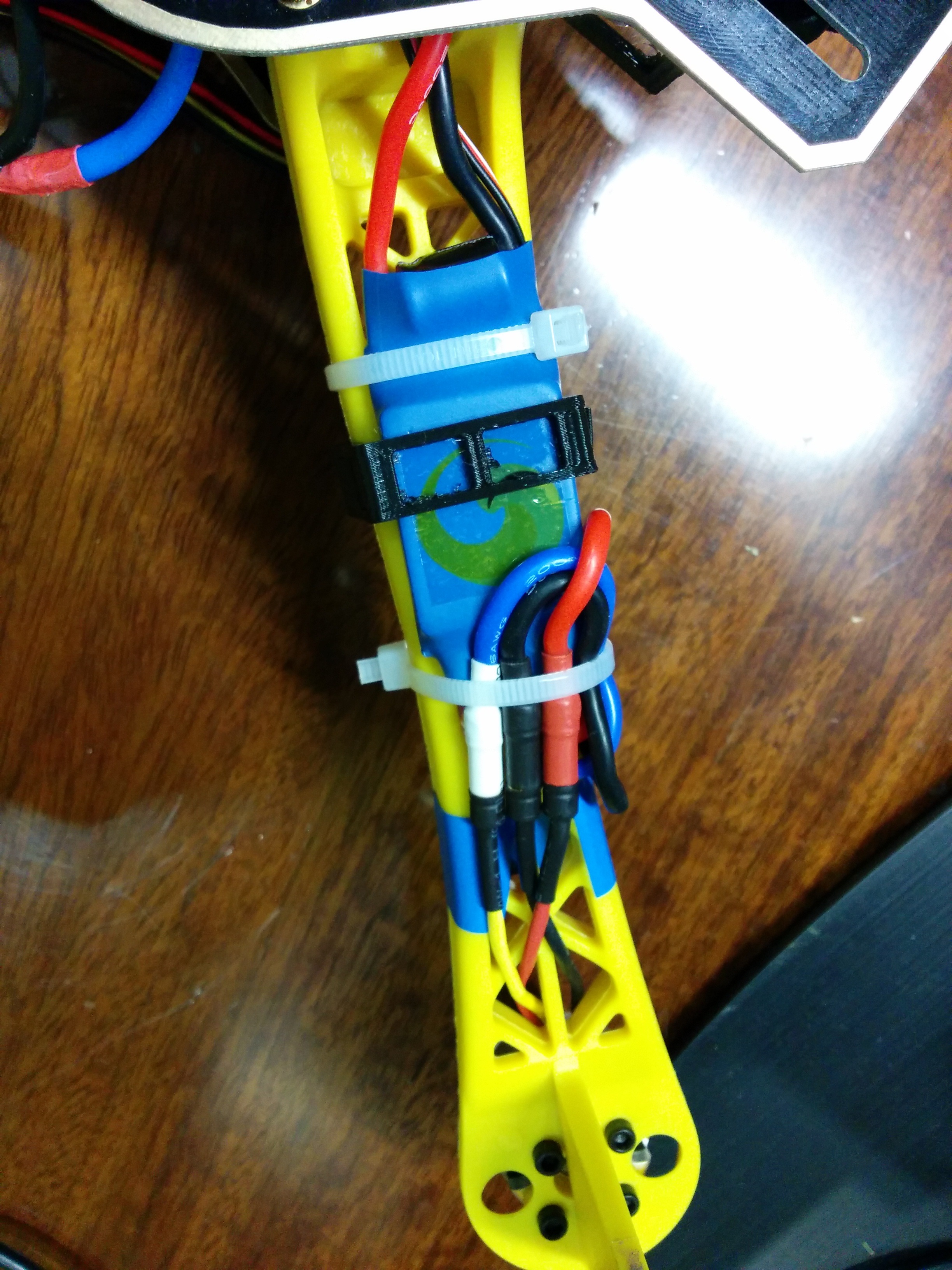
Battery holder assembly
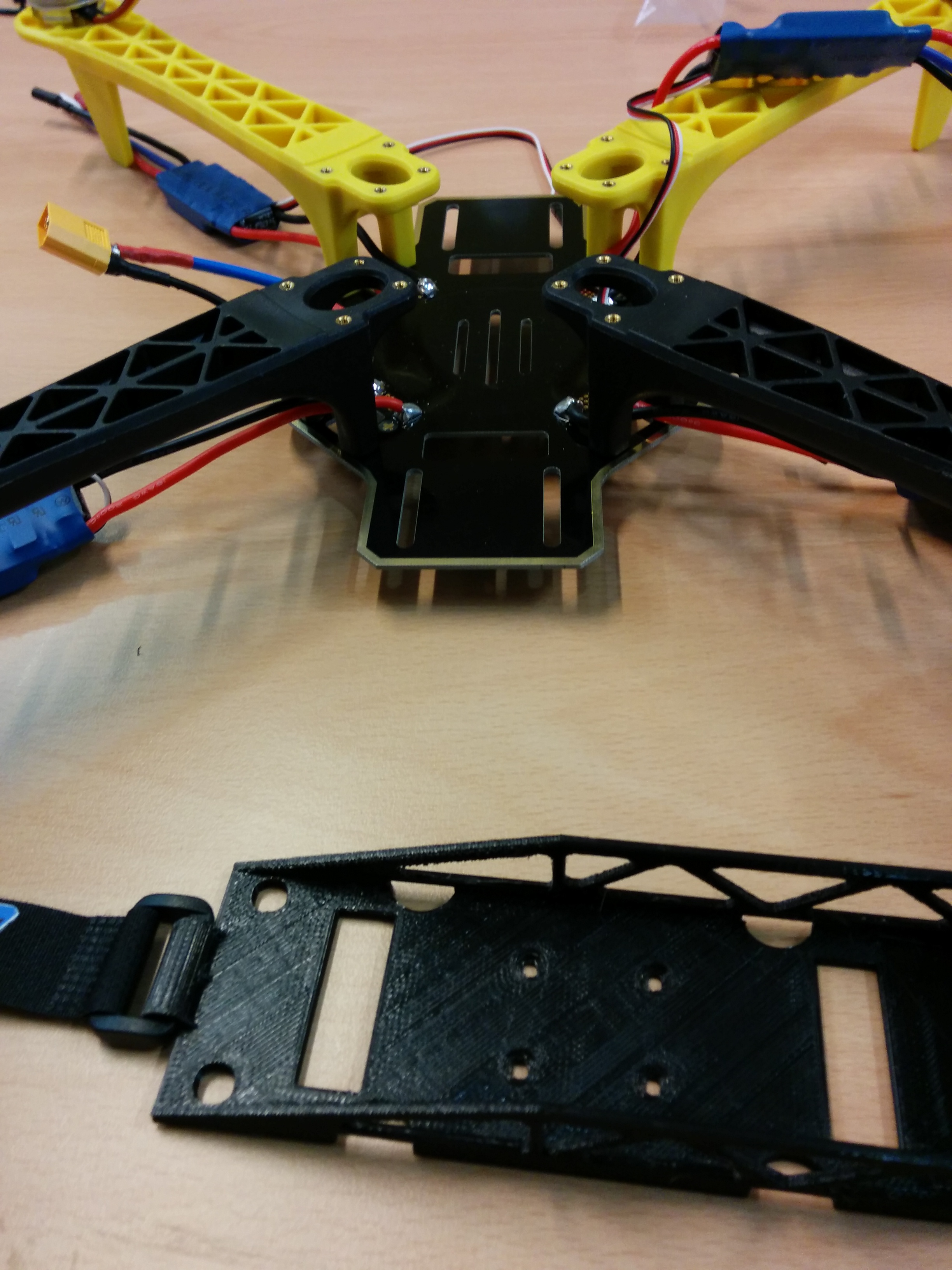
The battery holder allows to easily attach and detach the battery inside of the copter. We use two simple screws to fix it.

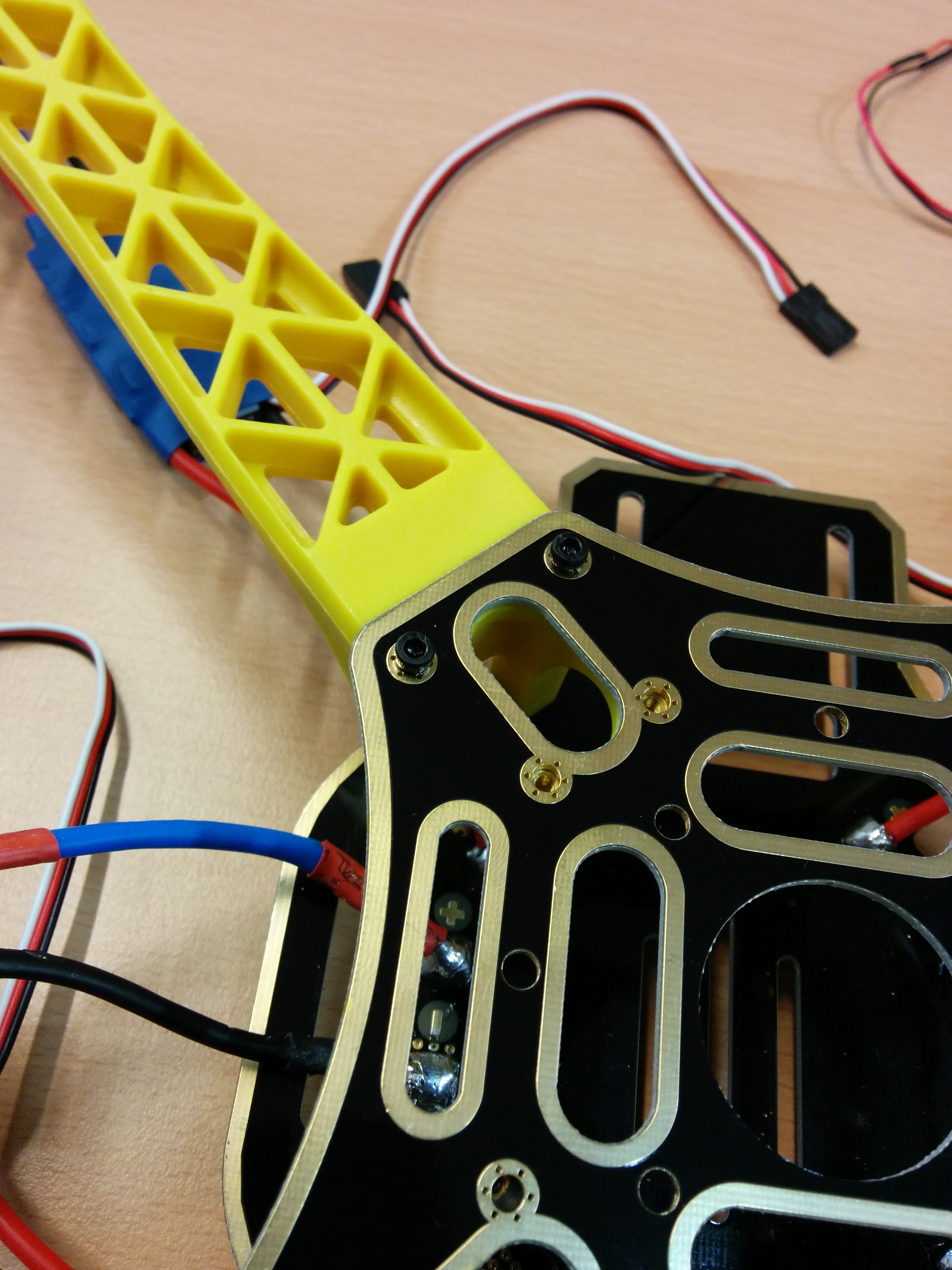
Mounting the upper frame
Next step is to mount the upper board and screw it.
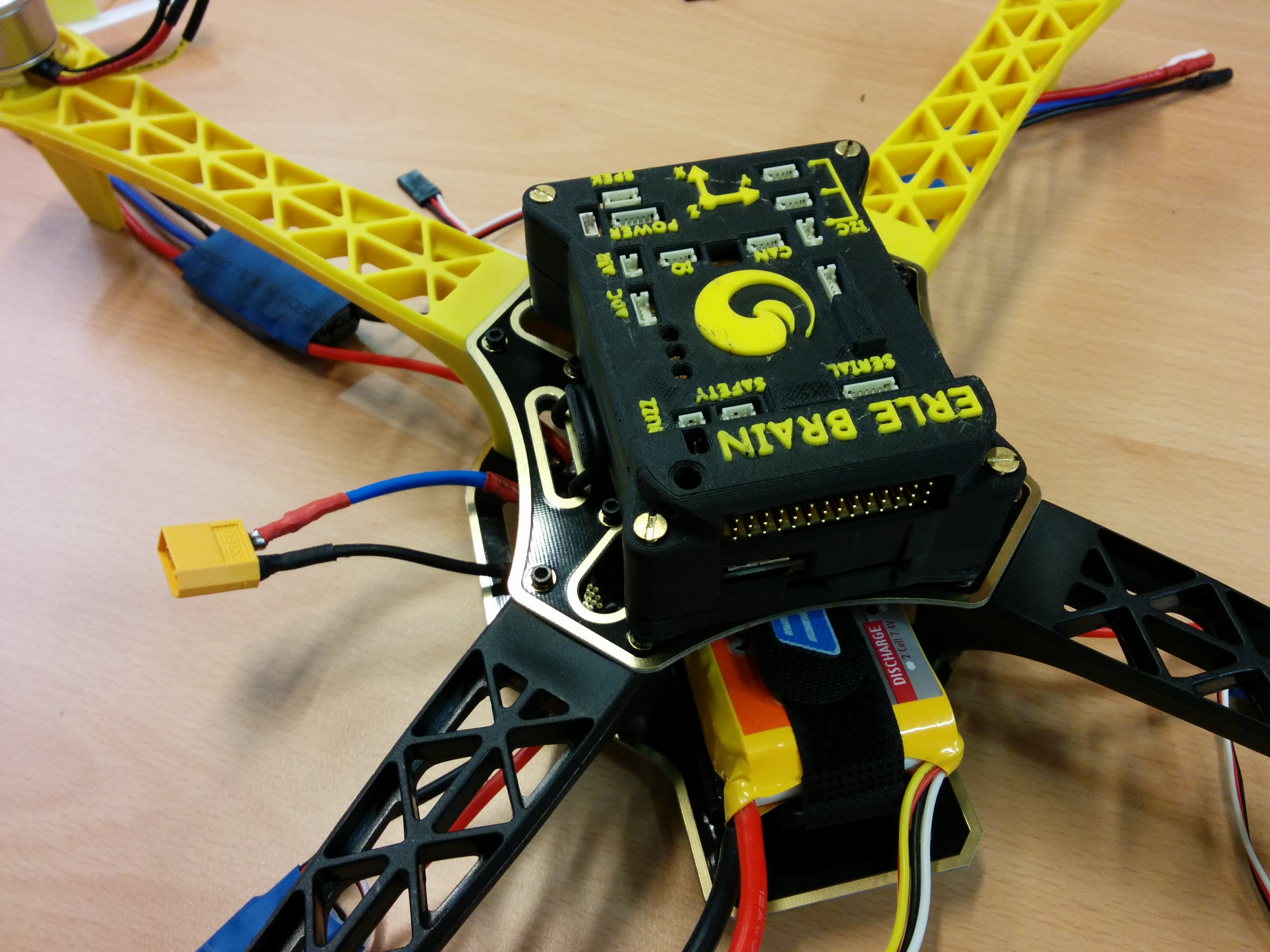
Mounting the autopilot
We will now mount Erle-brain in the copter. The autopilot comes with tiny flaps that allow to attach it pretty much anywhere with an elastic band:

Holding the ESCsC
We generally hold the ESCs using flanges but feel free to do it your own way:

Connecting everything to the autopilot
It's now time to start connecting all the peripherals to Erle-brain. Start with motor 1 connecting the signal (white cable) in the upper part:
Following motor 1, connect 2, 3 and 4. Next, you should attach the RC receiver that should be placed in the last row (number 14). If you plan to use a USB hub as we do now is the time ;).
After you've populated the motors and RC input we start hooking the DF-14 connectors with their corresponding devices. The power module and the buzzer are easy to identify. Depending on which GPS you've selected you'll have either one or two DF-14 connectors (the second will correspond with the external compass).
Propellers
We offer two kind of propellers:
Propellers generally come in pairs. One should turn in clockwise direction and the other in the opposite. Clockwise propellers are also known as "pusher kind" propellers and are marked with an "R" (sometimes it's a "P").
According to this assembly description:
- Motors 1 and 2 are counter-clockwise propellers
- Motors 3 and 4 should have clockwise propellers (marked with an "R" or a "P")
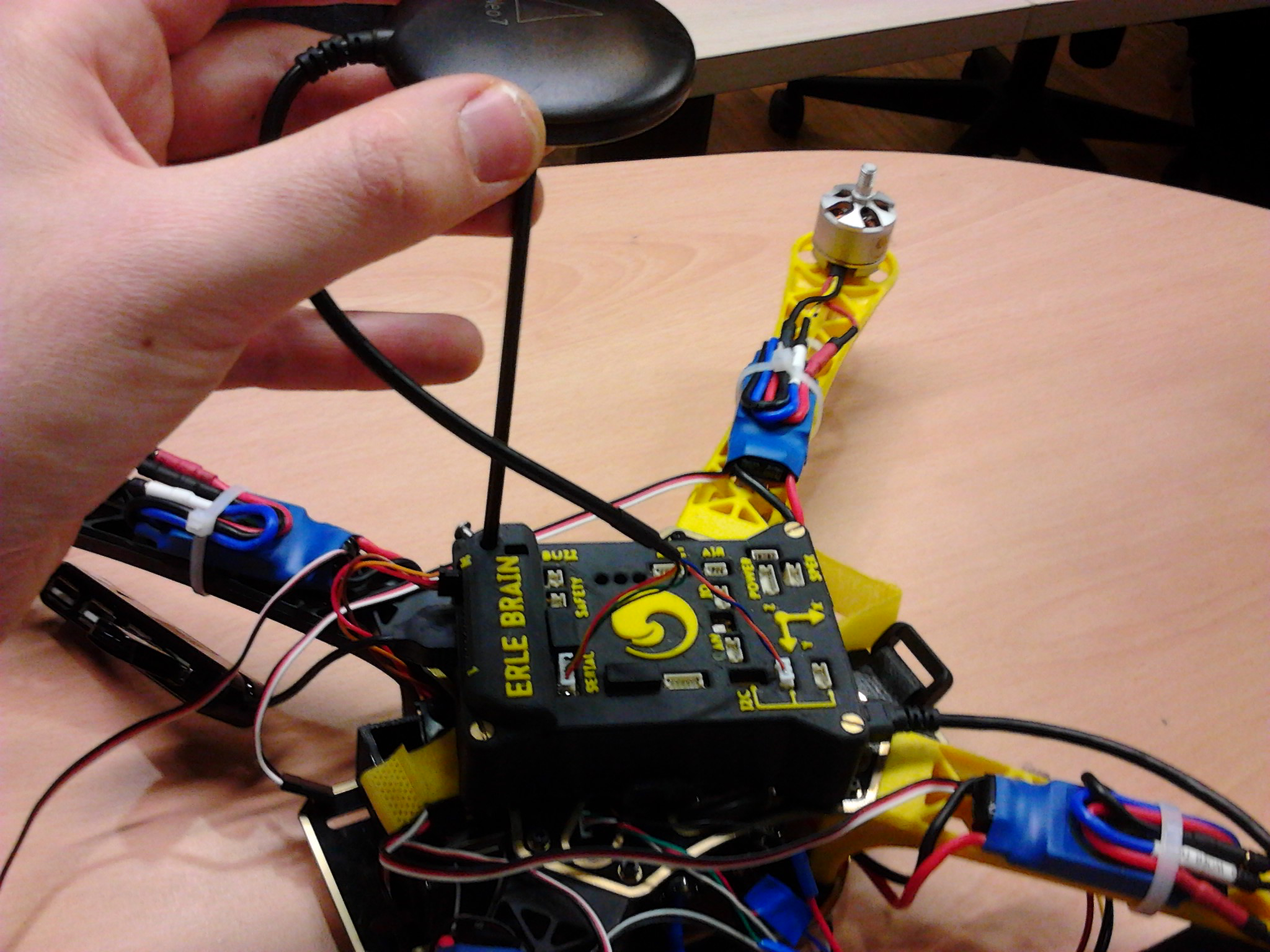
RC receiver
The RC receiver must be connected in the channel 14 of the rail. You can stick the receiver to the frame and stick the antennas:

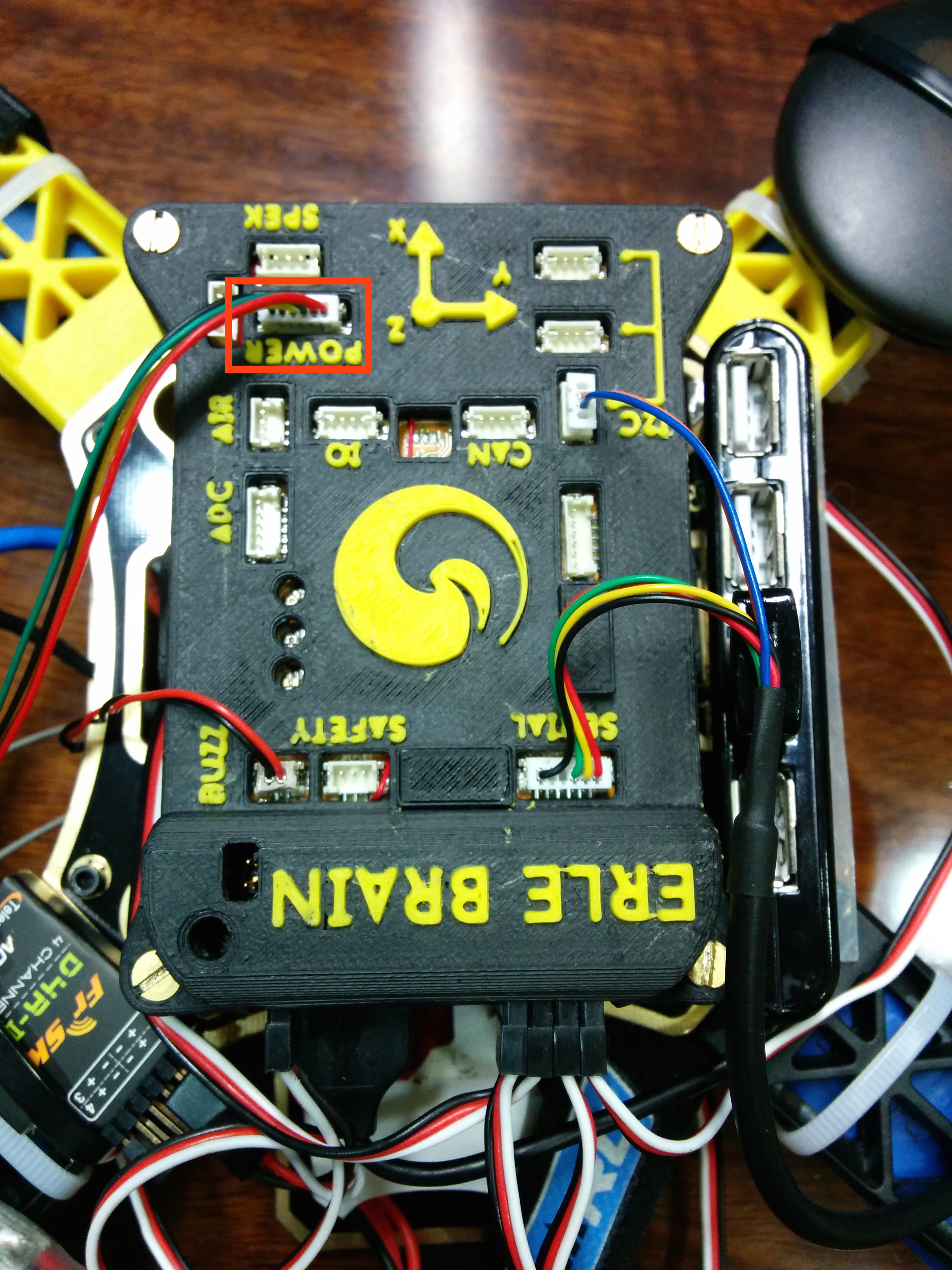
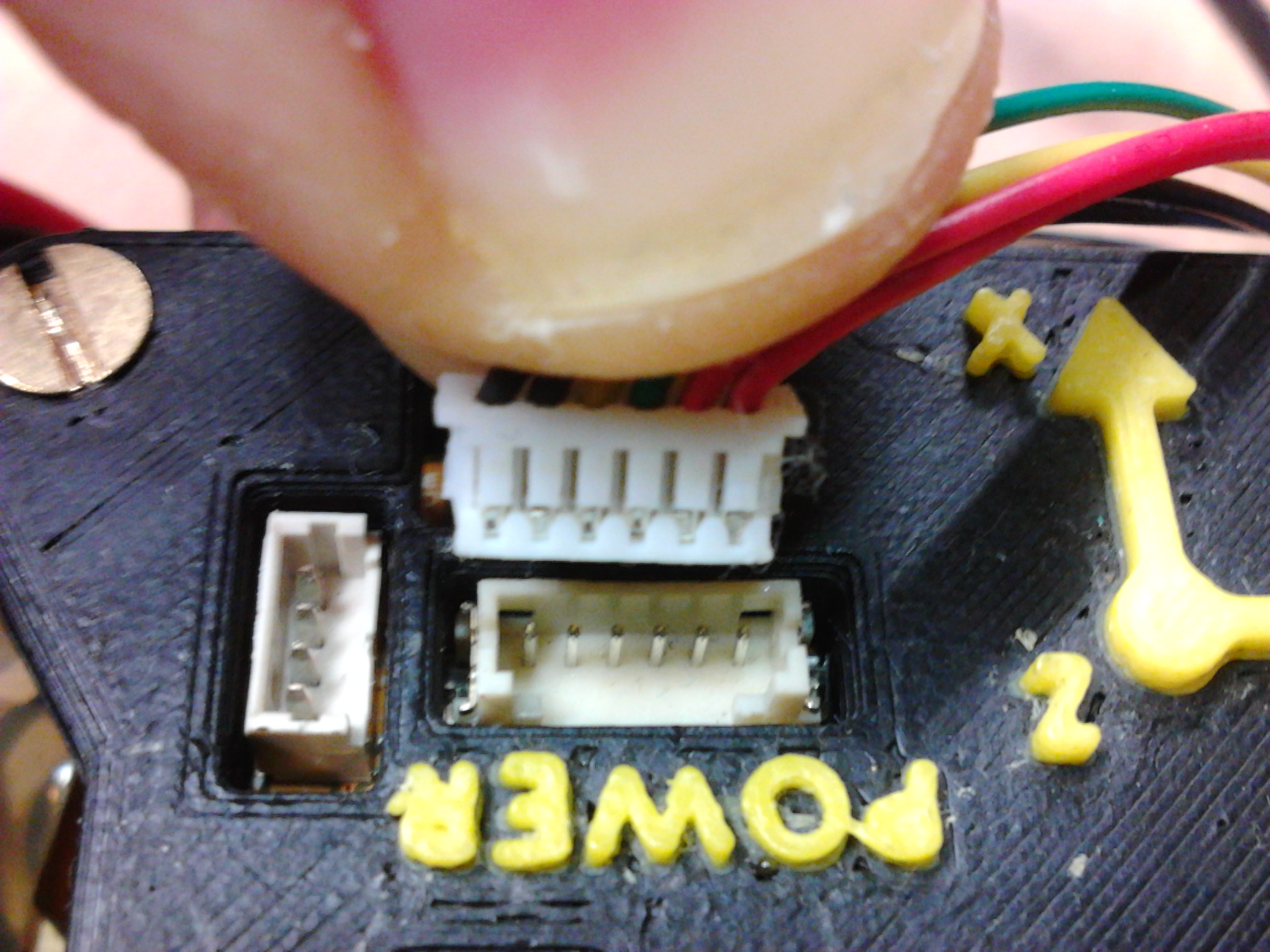
Power Module Connector
In order to power-up the Erle-Brain from the power module, you have to connect its 6 pin DF-13 connector to power:
Note: The power module connectors wire could be crossover in some cases. The only detail user has to be worried about is to insert the connector in the next way:
Before shipping, all the drones are tested. We deliver the drones when we have assured they are working as they should
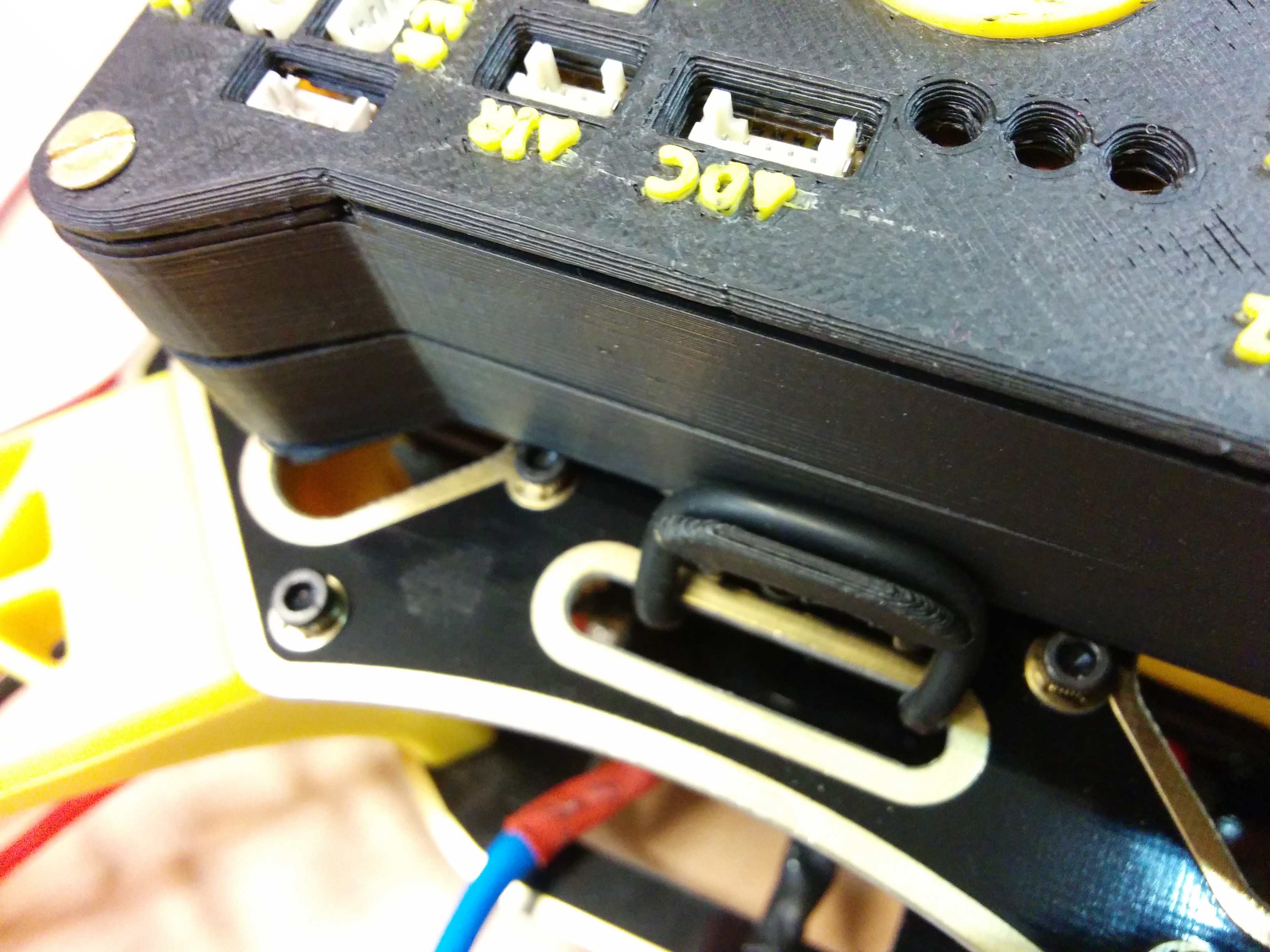
Dongles
Connect the dongles (WiFi, 3G, 4G, Bluetooth, ...) to the USB port:

Complementary Devices
Let's focus on how to connect the rest of the devices to Erle-Brain.
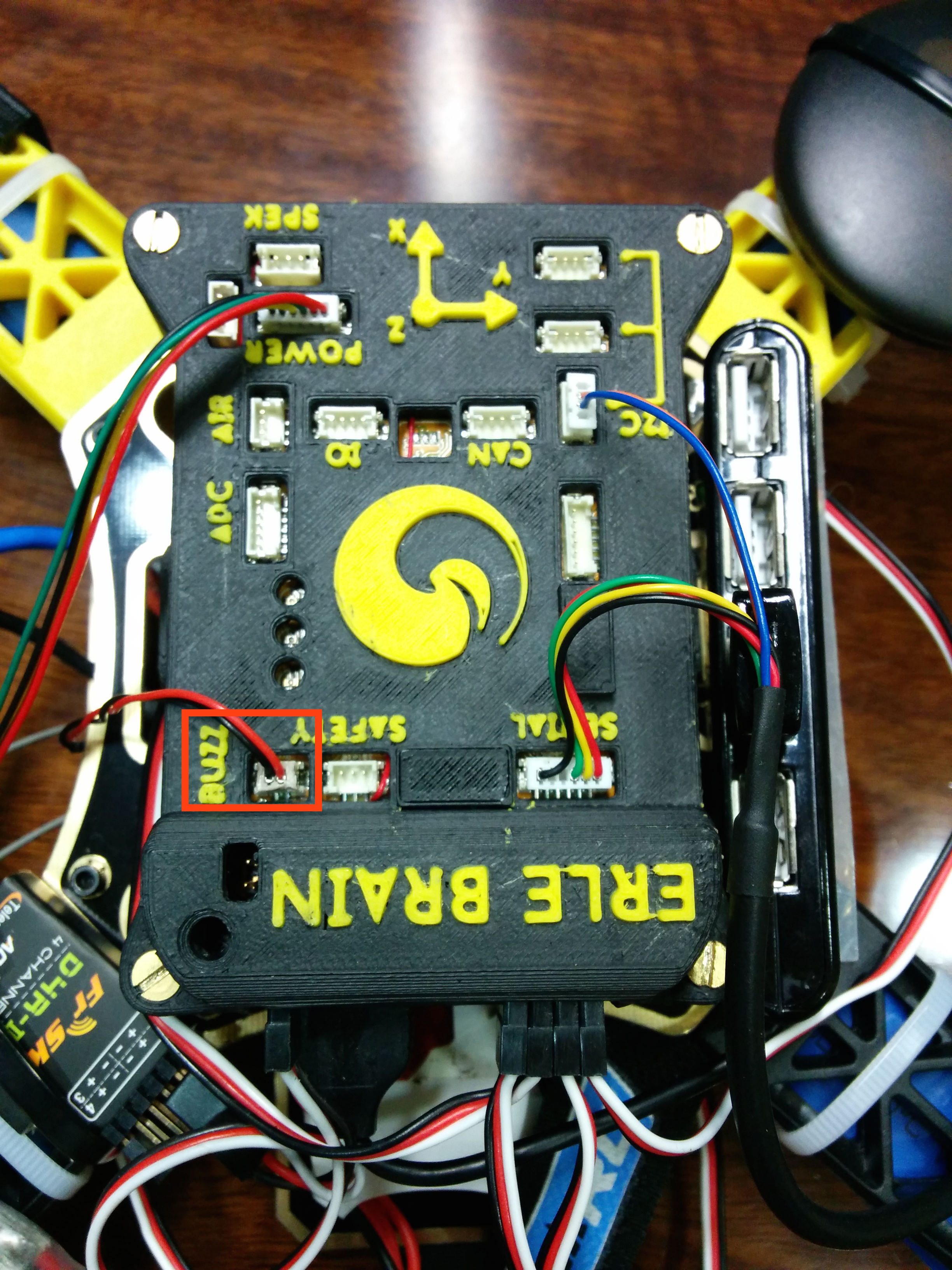
Buzzer
The buzzer must be connected to the only 2 pin DF-13 connector that Erle-Brain has.
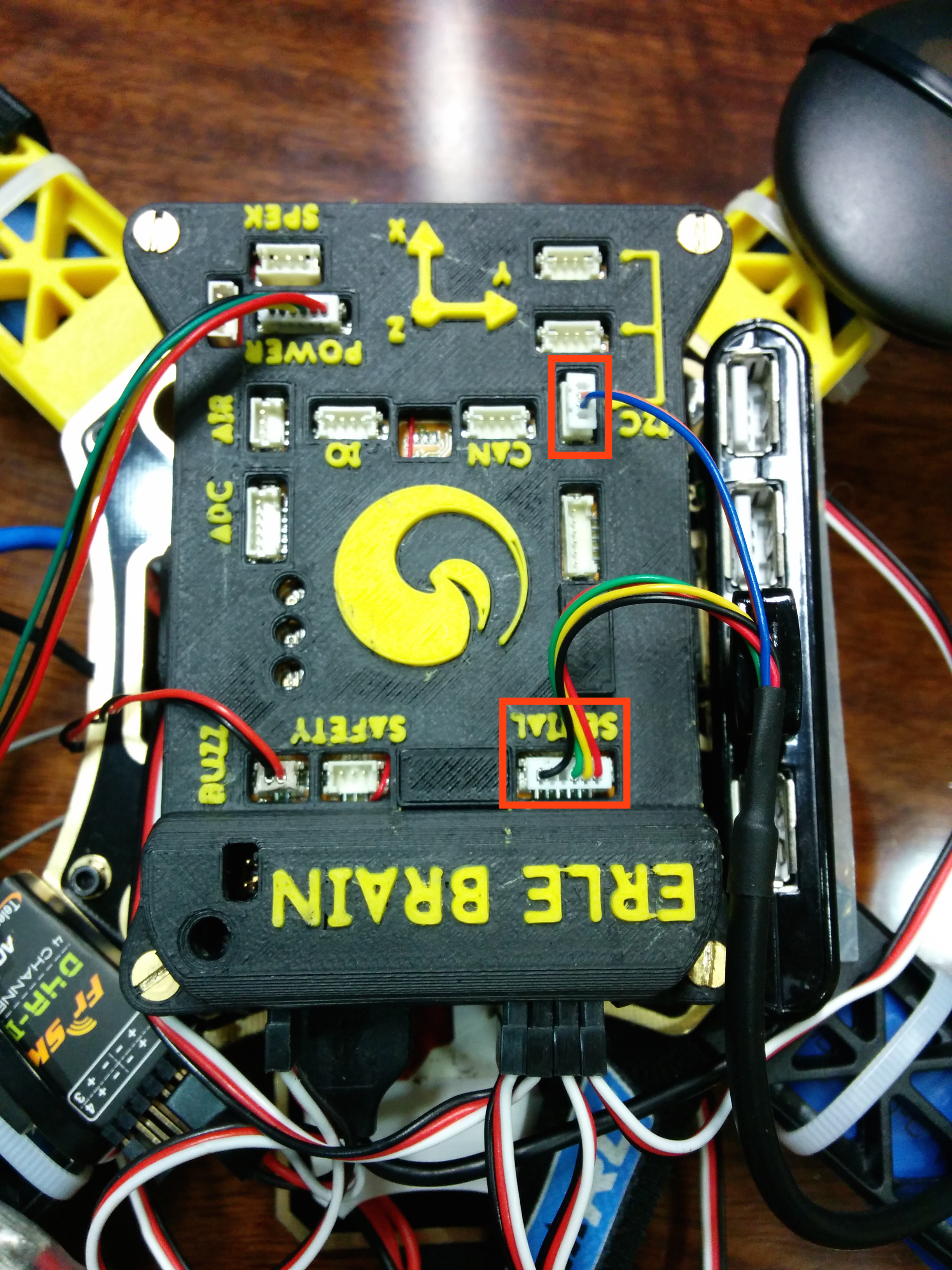
GPS and compass
The case of the Erle-Brain has a hole in order to place it with the help of a screw:
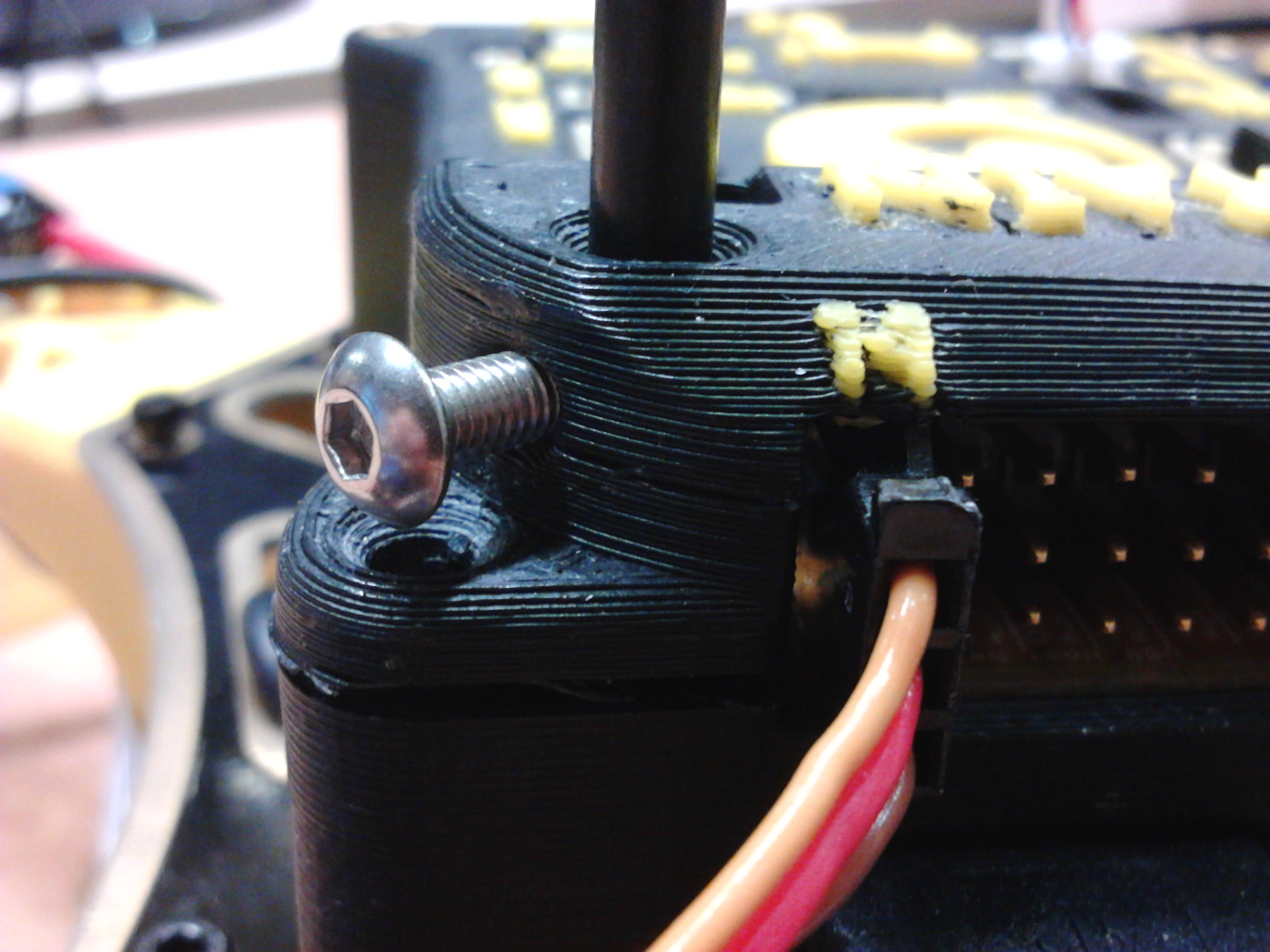
The GPS should go into the SERIAL port and the compass (DF-14 4 pins) should go in one of the I2C ports.
You can watch the mounting process here
The hardware is now ready to fly :) but before you do so, make sure you check the software aspects.