Paquete ROS mavros
mavros es un nodo ROS que extiende las comuniciones mediente MAVLink mediante un proxy para una Estación de Control de Tierra. Está documentado aquí.
Este paquete (disponible aquí) implementa un nodo ROS que extiende las comuniciones mediente MAVLink mediante un proxy para una Estación de Control de Tierra que incluye las siguientes características:
- Comunicación el autopiloto a través de puerto serie.
- Proxy UDP para ka Estación de Control en Tierra
- mavlink_ros es compatible con los Topics de ROS (Mavlink.msg)
- Sistema de plugins para la traducción de ROS-MAVLink
- Herramienta de manipulación de parámetros.
- Herramienta de manipulación de Waypoint
mavlink como una librería
Antes de compilar, es necesario realizar el siguiente paso que podría llegar algún tiempo si no se realiza correctamente, por lo tanto, vamos a explicar como hacerlo:
Ve al espacio de trabajo de ROS y clona el siguiente paquete https://github.com/vooon/mavros.
*En lugar de clonar el repositorio manualmente se puede utilizar wstool.
Nota: Un .deb ha sido generado para BeagleBone y esta disponible en https://github.com/vmayoral/ros-stuff/tree/master/deb
cd <catkin-ros-workspace>
cd src
git clone https://github.com/vooon/mavros
Ahora checkout la rama que corresponde con la instalación ROS:
master
remotes/origin/HEAD -> origin/master
remotes/origin/debian/hydro/mavlink
remotes/origin/debian/hydro/precise/mavlink
remotes/origin/debian/hydro/quantal/mavlink
remotes/origin/debian/hydro/raring/mavlink
remotes/origin/debian/indigo/mavlink
remotes/origin/debian/indigo/saucy/mavlink
remotes/origin/debian/indigo/trusty/mavlink
remotes/origin/master
remotes/origin/patches/debian/hydro/mavlink
remotes/origin/patches/debian/hydro/precise/mavlink
remotes/origin/patches/debian/hydro/quantal/mavlink
remotes/origin/patches/debian/hydro/raring/mavlink
remotes/origin/patches/debian/indigo/mavlink
remotes/origin/patches/debian/indigo/saucy/mavlink
remotes/origin/patches/debian/indigo/trusty/mavlink
remotes/origin/patches/release/hydro/mavlink
remotes/origin/patches/release/indigo/mavlink
remotes/origin/release/hydro/mavlink
remotes/origin/release/indigo/mavlink
remotes/origin/upstream
Finalmente ve al espacio de trabajo de nuevo y ejecuta catkin_make_isolated --install-space /opt/ros/hydro/ --install (le recomendamos que deje únicamente el paquete mavlink).
Debes ver algo como esto:
root@erlerobot:~/catkin_ws_hydro# catkin_make_isolated --install-space /opt/ros/hydro/ --install
Base path: /root/catkin_ws_hydro
Source space: /root/catkin_ws_hydro/src
Build space: /root/catkin_ws_hydro/build_isolated
Devel space: /root/catkin_ws_hydro/devel_isolated
Install space: /root/catkin_ws_hydro/install_isolated
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~ traversing 1 packages in topological order:
~~ - mavlink (plain cmake)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
The packages or cmake arguments have changed, forcing cmake invocation
==> Processing plain cmake package: 'mavlink'
==> Creating build directory: 'build_isolated/mavlink/devel'
==> cmake /root/catkin_ws_hydro/src/mavlink-gbp-release -DCMAKE_INSTALL_PREFIX=/root/catkin_ws_hydro/devel_isolated/mavlink in '/root/catkin_ws_hydro/build_isolated/mavlink/devel'
-- Found PythonInterp: /usr/bin/python (found suitable version "2.7.3", required is "2")
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/autoquad.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/matrixpilot.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/minimal.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/pixhawk.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/slugs.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/test.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ualberta.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/sensesoar.xml
-- Using Debian Python package layout
-- Configuring done
-- Generating done
-- Build files have been written to: /root/catkin_ws_hydro/build_isolated/mavlink/devel
==> make -j1 -l1 in '/root/catkin_ws_hydro/build_isolated/mavlink/devel'
Scanning dependencies of target ardupilotmega.xml-v1.0
[ 10%] Generating ardupilotmega.xml-v1.0-stamp
Validating /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
Parsing /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
Note: message DATA64 is longer than 64 bytes long (74 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DATA96 is longer than 64 bytes long (106 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Validating /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
Parsing /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
...
El paquete mavlink debe de compilarse e instarse. Vamos a compilarlo.
Compilando mavros
LA compilación se realizó como se describe en mavlink_ros:compiling instructions. El paquete debe de ser descargado en ~/catkin_ws/src y catkin_make debe de ser llamado desde catkin_ws (visite ROS: Building a ROS Package para aprender más sobre como compilar paquetes ROS).
Atención: El paquete mavros esta disponible para la distribución hydro+. Tenga esto en cuenta
Ejecutando mavros
Ahora lanzamos el Autopiloto:
ArduCopter.elf -A tcp:*:6000:wait
Podemos facilmente verficar que se lanza un socket en todas las interfaces en el puerto 6000:
root@erlerobot:~# netstat -nap|grep Ardu
tcp 0 0 0.0.0.0:6000 0.0.0.0:* LISTEN 24632/ArduCopter.elf
Lanzamos mavros:
root@erlerobot:~# rosrun mavros mavros_node _fcu_url:=192.168.7.2
[ INFO] [1404307547.212478943]: serial: device: /dev/ttyAutopilot @ 115200 bps
[ INFO] [1404307547.232303568]: udp: Bind address: 0.0.0.0:14555
[ INFO] [1404307547.246258485]: udp: GCS address: 127.0.0.1:14550
[ INFO] [1404307548.616922693]: Plugin Command [alias command] loaded and initialized
[ INFO] [1404307548.745958777]: Plugin GPS [alias gps] loaded and initialized
[ INFO] [1404307548.965828360]: Plugin IMUPub [alias imu_pub] loaded and initialized
[ INFO] [1404307549.109628860]: Plugin Param [alias param] loaded and initialized
[ INFO] [1404307549.200207318]: Plugin RCIO [alias rc_io] loaded and initialized
[ INFO] [1404307549.357753943]: Plugin SystemStatus [alias sys_status] loaded and initialized
[ INFO] [1404307549.588623860]: Plugin Waypoint [alias waypoint] loaded and initialized
[ INFO] [1404307549.597910485]: MAVROS started on MAV 1 (component 240)
Jugando con mavros
victor@ubuntu:~$ rosnode list
/mavros
/rosout
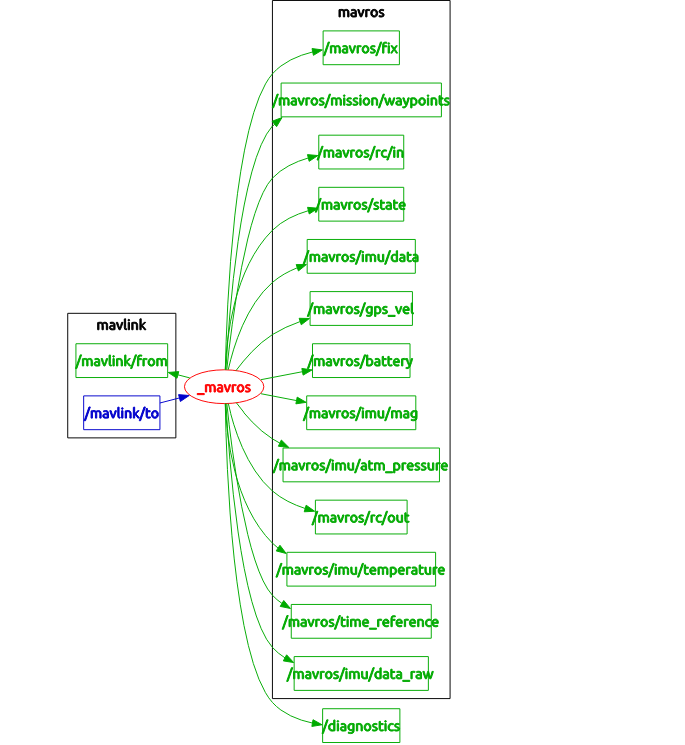
victor@ubuntu:~$ rostopic list
/diagnostics
/mavlink/from
/mavlink/to
/mavros/battery
/mavros/fix
/mavros/gps_vel
/mavros/imu/atm_pressure
/mavros/imu/data
/mavros/imu/data_raw
/mavros/imu/mag
/mavros/imu/temperature
/mavros/mission/waypoints
/mavros/rc/in
/mavros/rc/out
/mavros/state
/mavros/time_reference
/rosout
/rosout_agg
Necesitas establecer la tasa de muestreo:
rservice call /mavros/set_stream_rate 0 10 1
Ahora puedes visualizar los topics
rostopic list
/diagnostics
/mavlink/from
/mavlink/to
/mavros/battery
/mavros/camera_image
/mavros/camera_image/compressed
/mavros/camera_image/compressed/parameter_descriptions
/mavros/camera_image/compressed/parameter_updates
/mavros/camera_image/compressedDepth
/mavros/camera_image/compressedDepth/parameter_descriptions
/mavros/camera_image/compressedDepth/parameter_updates
/mavros/camera_image/theora
/mavros/camera_image/theora/parameter_descriptions
/mavros/camera_image/theora/parameter_updates
/mavros/fix
/mavros/global_position/compass_hdg
/mavros/global_position/global
/mavros/global_position/gps_vel
/mavros/global_position/local
/mavros/global_position/rel_alt
/mavros/gps_vel
/mavros/imu/atm_pressure
/mavros/imu/data
/mavros/imu/data_raw
/mavros/imu/mag
/mavros/imu/temperature
/mavros/mission/waypoints
/mavros/mocap/pose
/mavros/optical_flow
/mavros/position/local
/mavros/position/vision
/mavros/radio_status
/mavros/rc/in
/mavros/rc/out
/mavros/rc/override
/mavros/safety_area/set
/mavros/setpoint/accel
/mavros/setpoint/att_throttle
/mavros/setpoint/cmd_vel
/mavros/setpoint/local_position
/mavros/state
/mavros/time_reference
/mavros/vfr_hud
/mavros/vision_speed/speed_vector
/rosout
/rosout_agg
/tf
Por ejemplo, IMU:
rostopic echo /mavros/imu/data_raw
---
header:
seq: 11149
stamp:
secs: 1412071746
nsecs: 586876282
frame_id: fcu
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0
orientation_covariance: [-1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.006
y: -0.005
z: 0.009
angular_velocity_covariance: [1.2184696791468346e-07, 0.0, 0.0, 0.0, 1.2184696791468346e-07, 0.0, 0.0, 0.0, 1.2184696791468346e-07]
linear_acceleration:
x: -0.24516625
y: 0.0196133
z: 10.52253545
linear_acceleration_covariance: [8.999999999999999e-08, 0.0, 0.0, 0.0, 8.999999999999999e-08, 0.0, 0.0, 0.0, 8.999999999999999e-08]
---