autopilot_bridge ROS package
The autopilot_bridge ROS package bridges to autopilot protocols. For now it supports only MAVLink.
Compiling autopilot_bridge
Compilation is performed as described in the mavlink_ros:compiling instructions. The package should be downloaded into ~/catkin_ws/src and catkin_make should be called from catkin_ws (refer to ROS: Building a ROS Package for learning more about ROS package compilation).
Running autopilot_bridge
Over a serial connection:
rosrun autopilot_bridge mavlink.py --device /dev/ttyO4 --baudrate 115200 --skip-time-hack
NOTE: this requires both ardupilot and ROS running in the machine
root@erlerobot:~# rosrun autopilot_bridge mavlink.py --device /dev/ttyO5 --baudrate 115200 --skip-time-hack
Starting mavlink <-> ROS interface over the following link:
device: /dev/ttyO5
baudrate: 115200
Waiting for AP heartbeat
Heartbeat from AP (sys 1 comp 1 custom_mode 0)
Sending all stream request for rate 10
[WARN] [WallTime: 946693474.238413] Skipping time hack from autopilot, using saved system time
Starting autopilot loop...
NOTE: By default, the bridge waits to collect a time hack from the autopilot (SYSTEM_TIME message with non-zero fields). If running indoors or without GPS, you can specify --skip-time-hack to disable this behavior. In that case, the bridge uses the computer's time for all published messages.
To run over a TCP connection:
rosrun autopilot_bridge mavlink.py --device tcp:127.0.0.1:6000
Playing with autopilot_bridge
root@erlerobot:~# rosnode list
/autopilot
/rosout
root@erlerobot:~# rostopic list
/autopilot/arm
/autopilot/gps
/autopilot/gps_odom
/autopilot/guided_goto
/autopilot/heartbeat
/autopilot/imu
/autopilot/land
/autopilot/land_abort
/autopilot/mode
/autopilot/status
/autopilot/waypoint_goto
/rosout
/rosout_agg
Let's listen to the autopilot/imu ROS topic:
root@erlerobot:~# rostopic echo /autopilot/imu
header:
seq: 1
stamp:
secs: 946693613
nsecs: 904042959
frame_id: base_footprint
orientation:
x: 0.0100524548726
y: 0.184838964438
z: 0.00133298901126
w: 0.982716504653
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
header:
seq: 2
stamp:
secs: 946693614
nsecs: 185938954
frame_id: base_footprint
orientation:
x: 0.0131375821778
y: 0.217347333887
z: 0.00157136571938
w: 0.976004647118
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
...
another one:
root@erlerobot:~# rostopic echo /autopilot/status
header:
seq: 1
stamp:
secs: 946685514
nsecs: 678575992
frame_id: ''
mode: 15
armed: False
ahrs_ok: False
alt_rel: -1247770
as_ok: False
as_read: 0.0
gps_ok: False
gps_sats: 0
gps_eph: 0
ins_ok: False
mag_ok: False
mis_cur: 0
pwr_ok: True
pwr_batt_rem: -1
pwr_batt_vcc: 0
pwr_batt_cur: -1
---
header:
seq: 2
stamp:
secs: 946685516
nsecs: 646455049
frame_id: ''
mode: 15
armed: False
ahrs_ok: False
alt_rel: -463450
as_ok: False
as_read: 0.0
gps_ok: False
gps_sats: 0
gps_eph: 0
ins_ok: False
mag_ok: False
mis_cur: 0
pwr_ok: True
pwr_batt_rem: -1
pwr_batt_vcc: 0
pwr_batt_cur: -1
---
Visualizing autopilot_bridge
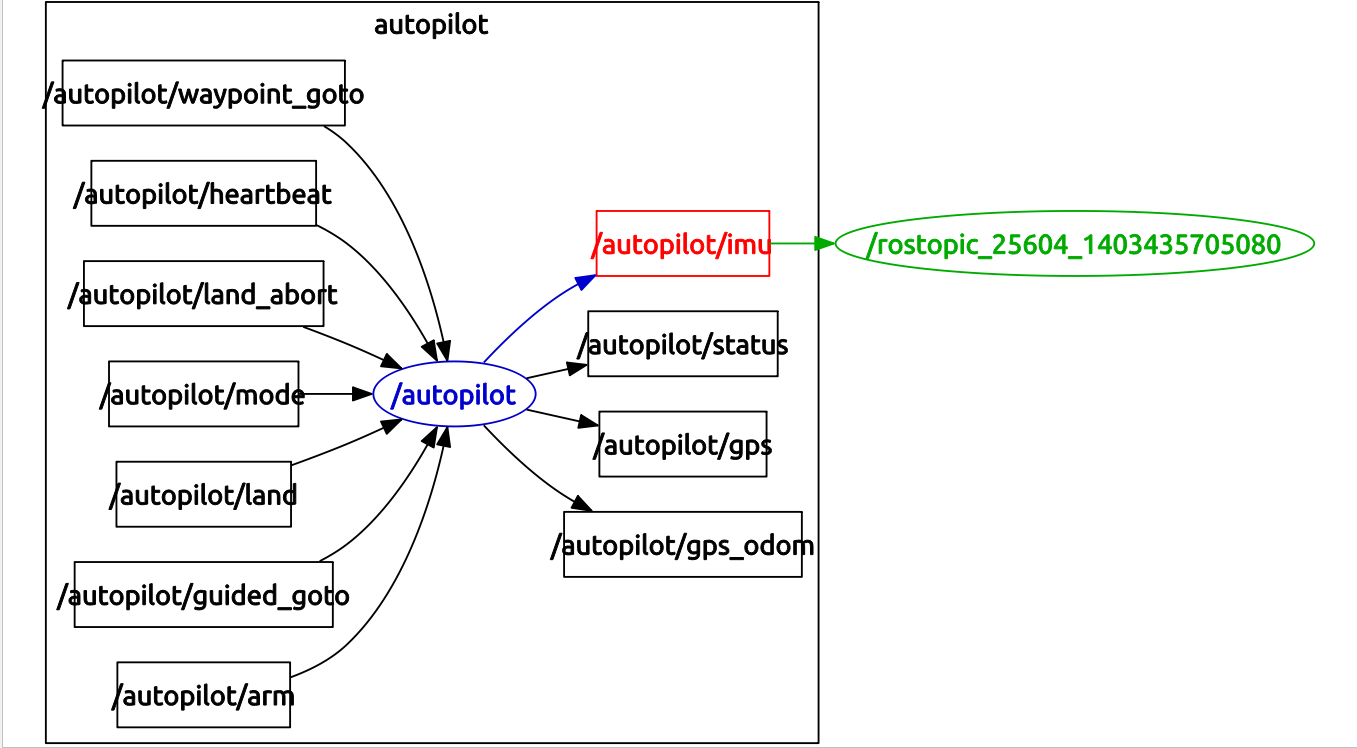
The ROS topic /autopilot/imu can be echoed but not plotted with rqt_plot.