mavros ROS package
l mavros is a MAVLink extendable communication node for ROS with UDP proxy for Ground Control Station. It's documented here.
This package (available here) implemments a MAVLink extendable communication node for ROS with UDP proxy for Ground Control Station that includes the following features:
- Communication with autopilot via serial port
- UDP proxy for Ground Control Station
- mavlink_ros compatible ROS topics (Mavlink.msg)
- Plugin system for ROS-MAVLink translation
- Parameter manipulation tool
- Waypoint manipulation tool
Making mavlink as a library
Before compiling mavros, this is a necessary step that might take you some time if not done properly so we'll explain how to do it:
Go to your ROS workspace and clone the following package https://github.com/vooon/mavros.
Instead of manually clonning the repository, wstool can be used.
Note: A .deb has been generated for the BeagleBone and is available at https://github.com/vmayoral/ros-stuff/tree/master/deb
cd <catkin-ros-workspace>
cd src
git clone https://github.com/vooon/mavros
Now checkout the branch that corresponds with your ROS installation:
master
remotes/origin/HEAD -> origin/master
remotes/origin/debian/hydro/mavlink
remotes/origin/debian/hydro/precise/mavlink
remotes/origin/debian/hydro/quantal/mavlink
remotes/origin/debian/hydro/raring/mavlink
remotes/origin/debian/indigo/mavlink
remotes/origin/debian/indigo/saucy/mavlink
remotes/origin/debian/indigo/trusty/mavlink
remotes/origin/master
remotes/origin/patches/debian/hydro/mavlink
remotes/origin/patches/debian/hydro/precise/mavlink
remotes/origin/patches/debian/hydro/quantal/mavlink
remotes/origin/patches/debian/hydro/raring/mavlink
remotes/origin/patches/debian/indigo/mavlink
remotes/origin/patches/debian/indigo/saucy/mavlink
remotes/origin/patches/debian/indigo/trusty/mavlink
remotes/origin/patches/release/hydro/mavlink
remotes/origin/patches/release/indigo/mavlink
remotes/origin/release/hydro/mavlink
remotes/origin/release/indigo/mavlink
remotes/origin/upstream
Finally go to the worspace again and execute catkin_make_isolated --install-space /opt/ros/hydro/ --install (we recommend you to leave solely the mavlink package just cloned).
You should see something like this:
root@erlerobot:~/catkin_ws_hydro# catkin_make_isolated --install-space /opt/ros/hydro/ --install
Base path: /root/catkin_ws_hydro
Source space: /root/catkin_ws_hydro/src
Build space: /root/catkin_ws_hydro/build_isolated
Devel space: /root/catkin_ws_hydro/devel_isolated
Install space: /root/catkin_ws_hydro/install_isolated
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~ traversing 1 packages in topological order:
~~ - mavlink (plain cmake)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
The packages or cmake arguments have changed, forcing cmake invocation
==> Processing plain cmake package: 'mavlink'
==> Creating build directory: 'build_isolated/mavlink/devel'
==> cmake /root/catkin_ws_hydro/src/mavlink-gbp-release -DCMAKE_INSTALL_PREFIX=/root/catkin_ws_hydro/devel_isolated/mavlink in '/root/catkin_ws_hydro/build_isolated/mavlink/devel'
-- Found PythonInterp: /usr/bin/python (found suitable version "2.7.3", required is "2")
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/autoquad.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/matrixpilot.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/minimal.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/pixhawk.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/slugs.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/test.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ualberta.xml
-- processing: /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/sensesoar.xml
-- Using Debian Python package layout
-- Configuring done
-- Generating done
-- Build files have been written to: /root/catkin_ws_hydro/build_isolated/mavlink/devel
==> make -j1 -l1 in '/root/catkin_ws_hydro/build_isolated/mavlink/devel'
Scanning dependencies of target ardupilotmega.xml-v1.0
[ 10%] Generating ardupilotmega.xml-v1.0-stamp
Validating /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
Parsing /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/ardupilotmega.xml
Note: message DATA64 is longer than 64 bytes long (74 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Note: message DATA96 is longer than 64 bytes long (106 bytes), which can cause fragmentation since many radio modems use 64 bytes as maximum air transfer unit.
Validating /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
Parsing /root/catkin_ws_hydro/src/mavlink-gbp-release/message_definitions/v1.0/common.xml
...
mavlink package should be compiled and installed. Let's now compile mavros.
Compiling mavros
Compilation is performed as described in the mavlink_ros:compiling instructions. The package should be downloaded into ~/catkin_ws/src and catkin_make should be called from catkin_ws (refer to ROS: Building a ROS Package for learning more about ROS package compilation).
WARNING: The mavros package is available for hydro+ distros. Take it into account.
Running mavros
So we start launching ardupilot:
ArduCopter.elf -A tcp:*:6000:wait
We can easily verify that this launches a socket in all interfaces listening in port 6000:
root@erlerobot:~# netstat -nap|grep Ardu
tcp 0 0 0.0.0.0:6000 0.0.0.0:* LISTEN 24632/ArduCopter.elf
Finally we launch mavros:
root@erlerobot:~# rosrun mavros mavros_node _fcu_url:=192.168.7.2
[ INFO] [1404307547.212478943]: serial: device: /dev/ttyAutopilot @ 115200 bps
[ INFO] [1404307547.232303568]: udp: Bind address: 0.0.0.0:14555
[ INFO] [1404307547.246258485]: udp: GCS address: 127.0.0.1:14550
[ INFO] [1404307548.616922693]: Plugin Command [alias command] loaded and initialized
[ INFO] [1404307548.745958777]: Plugin GPS [alias gps] loaded and initialized
[ INFO] [1404307548.965828360]: Plugin IMUPub [alias imu_pub] loaded and initialized
[ INFO] [1404307549.109628860]: Plugin Param [alias param] loaded and initialized
[ INFO] [1404307549.200207318]: Plugin RCIO [alias rc_io] loaded and initialized
[ INFO] [1404307549.357753943]: Plugin SystemStatus [alias sys_status] loaded and initialized
[ INFO] [1404307549.588623860]: Plugin Waypoint [alias waypoint] loaded and initialized
[ INFO] [1404307549.597910485]: MAVROS started on MAV 1 (component 240)
Playing with mavros
victor@ubuntu:~$ rosnode list
/mavros
/rosout
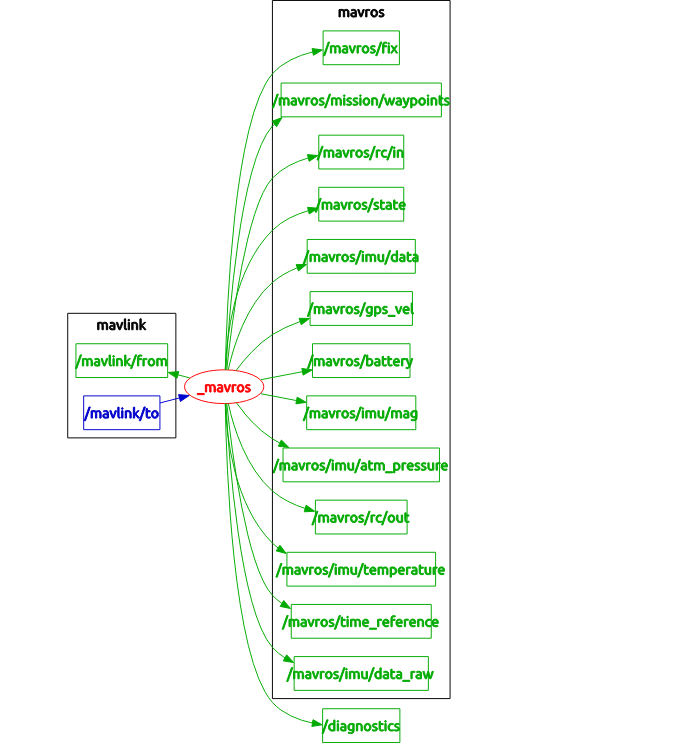
victor@ubuntu:~$ rostopic list
/diagnostics
/mavlink/from
/mavlink/to
/mavros/battery
/mavros/fix
/mavros/gps_vel
/mavros/imu/atm_pressure
/mavros/imu/data
/mavros/imu/data_raw
/mavros/imu/mag
/mavros/imu/temperature
/mavros/mission/waypoints
/mavros/rc/in
/mavros/rc/out
/mavros/state
/mavros/time_reference
/rosout
/rosout_agg
You need to set the stream rate:
rservice call /mavros/set_stream_rate 0 10 1
Then you can visualize topics
rostopic list
/diagnostics
/mavlink/from
/mavlink/to
/mavros/battery
/mavros/camera_image
/mavros/camera_image/compressed
/mavros/camera_image/compressed/parameter_descriptions
/mavros/camera_image/compressed/parameter_updates
/mavros/camera_image/compressedDepth
/mavros/camera_image/compressedDepth/parameter_descriptions
/mavros/camera_image/compressedDepth/parameter_updates
/mavros/camera_image/theora
/mavros/camera_image/theora/parameter_descriptions
/mavros/camera_image/theora/parameter_updates
/mavros/fix
/mavros/global_position/compass_hdg
/mavros/global_position/global
/mavros/global_position/gps_vel
/mavros/global_position/local
/mavros/global_position/rel_alt
/mavros/gps_vel
/mavros/imu/atm_pressure
/mavros/imu/data
/mavros/imu/data_raw
/mavros/imu/mag
/mavros/imu/temperature
/mavros/mission/waypoints
/mavros/mocap/pose
/mavros/optical_flow
/mavros/position/local
/mavros/position/vision
/mavros/radio_status
/mavros/rc/in
/mavros/rc/out
/mavros/rc/override
/mavros/safety_area/set
/mavros/setpoint/accel
/mavros/setpoint/att_throttle
/mavros/setpoint/cmd_vel
/mavros/setpoint/local_position
/mavros/state
/mavros/time_reference
/mavros/vfr_hud
/mavros/vision_speed/speed_vector
/rosout
/rosout_agg
/tf
For example, IMU:
rostopic echo /mavros/imu/data_raw
---
header:
seq: 11149
stamp:
secs: 1412071746
nsecs: 586876282
frame_id: fcu
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0
orientation_covariance: [-1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.006
y: -0.005
z: 0.009
angular_velocity_covariance: [1.2184696791468346e-07, 0.0, 0.0, 0.0, 1.2184696791468346e-07, 0.0, 0.0, 0.0, 1.2184696791468346e-07]
linear_acceleration:
x: -0.24516625
y: 0.0196133
z: 10.52253545
linear_acceleration_covariance: [8.999999999999999e-08, 0.0, 0.0, 0.0, 8.999999999999999e-08, 0.0, 0.0, 0.0, 8.999999999999999e-08]
---
Some aspects has change. Refer to the package docs for an updated documentation.