- Erle Robotics: Erle-copter
- Introducción
- 1. Hardware
- 2. Software
- 3. Modos de vuelo
Calibración ESC
http://copter.ardupilot.com/wiki/initial-setup/esc-motor/
Los controladores electrónicos de velocidad son los responsable de regular los motores a la velocidad deseada por el autopiloto. La mayoría de los ESCs necesitan calibrarse para conocer los valores máximos y minimos de PWM que el controlador de vuelo enviará. Esta página proporciona información sobre como calibrar los ESCs.
Calibrando todos a la vez
Chequeo de seguridad!
Antes de calibrar los ESCs, por favor, asegúrate de que tu multicóptero no tiene puestas las hélices, que APM no esté conectado a tu ordenador vía USB y que la batería LIPO está desconectada.


Enciende el transmisor y pon el stick del throttle en el valor máximo.
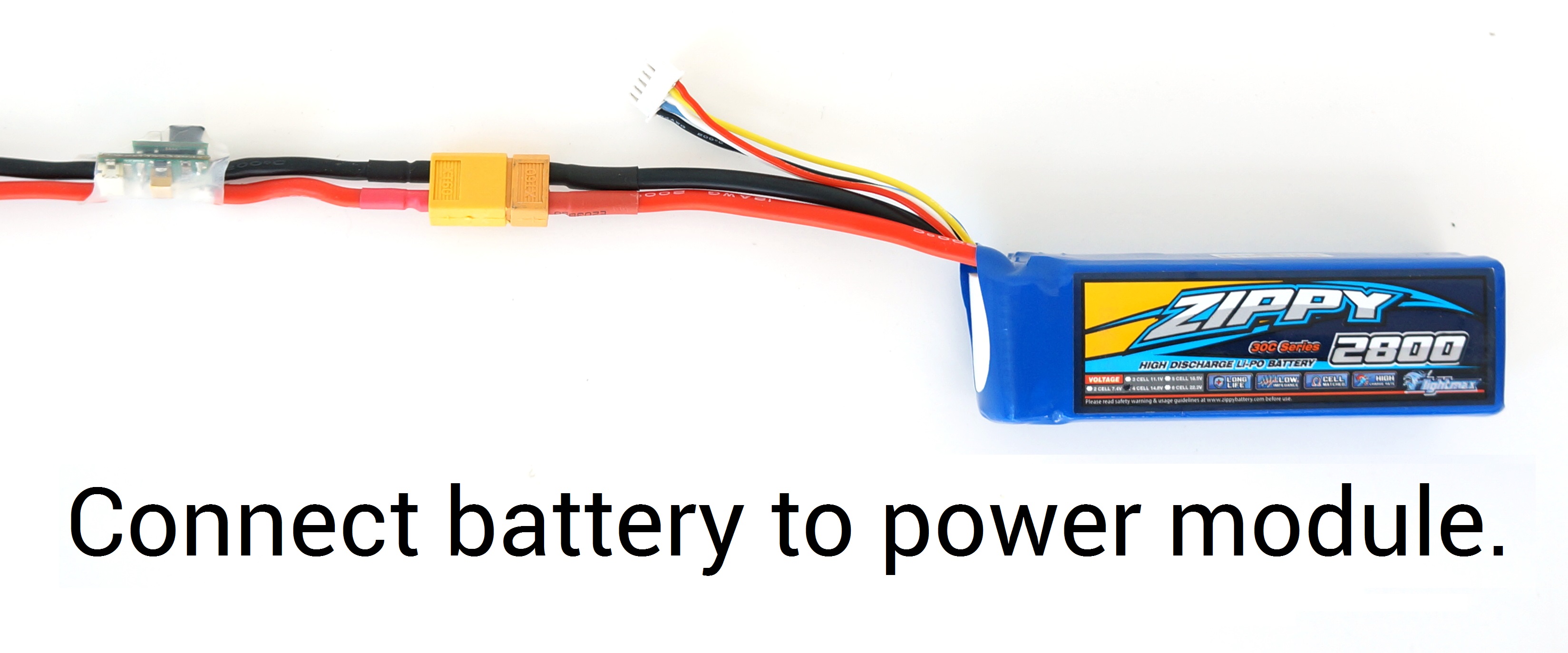
Conecta la batería (LiPo). Los LEDs rojo, azul y amarillo del autopiloto, se iluminarán en un patrón cíclico. Esto significa que está listo para entrar en el modo calibración de los ESC la próxima vez que te conectes.
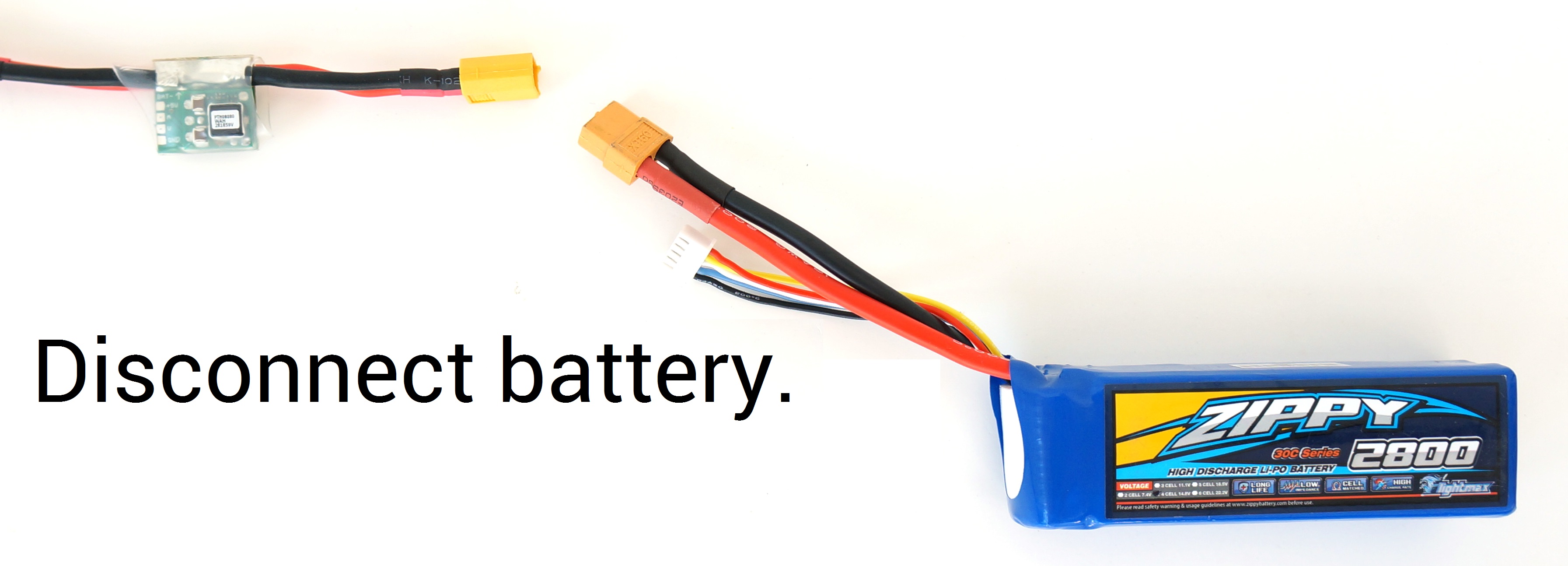
- Con el stick del throttle todavía en el valor máximo, desconecta y vuelve a conectar la bateria.
Ahora el autopiloto está en el modo calibración de ESC. (Los LEDs rojo y azul de APM tiene que estar parpadenado de forma alterna, como un coche de policía).
Espera a que los ESCs emitan un tono musical, el número de pitidos que indican el número de celdas que posee la batería (es decir, 3 para 3S, 4 para 4S) y adicionalmente dos pitidos para indicar que el valor máximo del throtlle ha sido capturado.
Pon el stick del throtlle a su posición mínima.
Los ESCs deben emitir un tono largo indicando que el valor mínimo del throtlle ha sido capturado y la calibración ha sido completada.
Si se escucha un tono largo indicando que la calibración ha sido completada, ahora los ESC están en funcionamiento, y si mueves el throtlle los motores deben girar. Testea que los motores giran, moviendo levemente el throtlle y devolviéndolo a la posición mínima.
Leva el throtlle a su valor mínimo y desconecta la bateria para salir del modo calibración de ESC.