MAVGraph
MAVGraph permite representar cualquier dato de vuelo. El comando es exactamente el mismo que el modulo graph en MAVProxy.
Uso:
mavgraph.py [-h] [--no-timestamps] [--planner] [--condition CONDITION]
[--labels LABELS] [--legend LEGEND] [--legend2 LEGEND2]
[--marker MARKER] [--linestyle LINESTYLE] [--xaxis XAXIS]
[--multi] [--zero-time-base] [--flightmode FLIGHTMODE]
[--output OUTPUT]
<LOG or FIELD> [<LOG or FIELD> ...]
Argumentos posicionales:
<LOG or FIELD>
Argumentos opcionales:
-h, --help show this help message and exit
--no-timestamps Log doesn't have timestamps
--planner use planner file format
--condition CONDITION
select packets by a condition
--labels LABELS comma separated field labels
--legend LEGEND default legend position
--legend2 LEGEND2 default legend2 position
--marker MARKER point marker
--linestyle LINESTYLE
line style
--xaxis XAXIS X axis expression
--multi multiple files with same colours
--zero-time-base use Z time base for DF logs
--flightmode FLIGHTMODE
Choose the plot background according to the active
flight mode of the specified type, e.g.
--flightmode=apm for ArduPilot or --flightmode=px4 for
PX4 stack logs. Cannot be specified with --xaxis.
--output OUTPUT provide an output format
Ejemplo
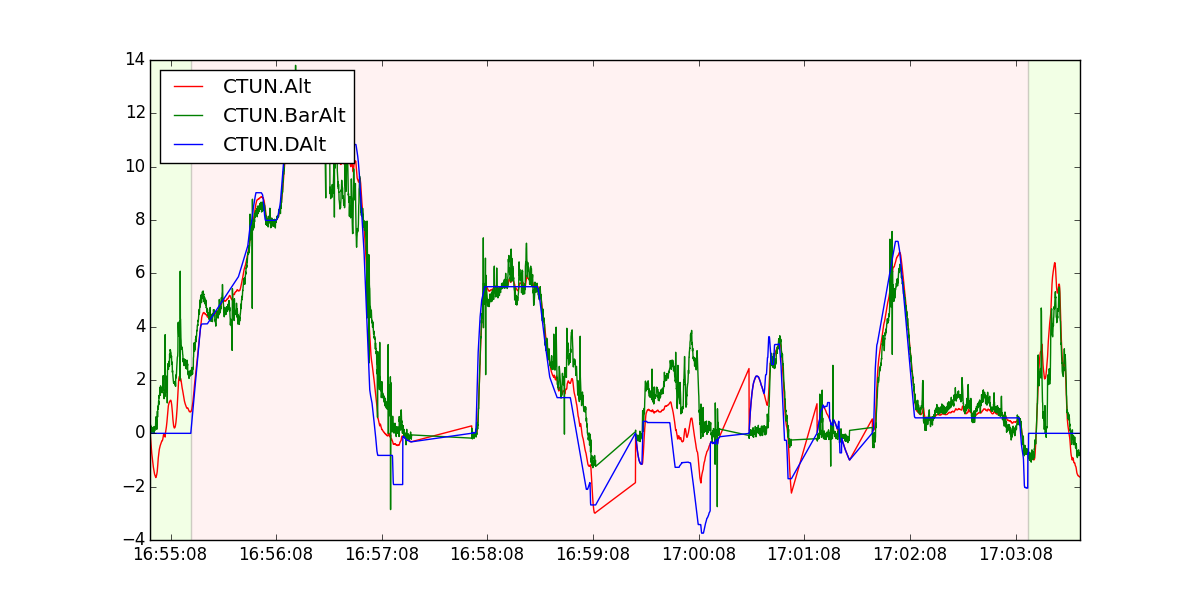
mavgraph.py 1.BIN "CTUN.BarAlt" "CTUN.Alt" "CTUN.DAlt"
Flags
--flightmode
Este flag permite mostrar los diferentes modos de vuelo.El color de fondo de la gráfica cambia dependiendo del modo de vuelo. A continuación puedes ver el código de colores:
'MANUAL' : (1.0, 0, 0), -> rojo
'AUTO' : ( 0, 1.0, 0), -> verde
'LOITER' : ( 0, 0, 1.0), -> azul
'FBWA' : (1.0, 0.5, 0), -> naraja
'RTL' : ( 1, 0, 0.5), -> rosa
'STABILIZE' : (0.5, 1.0, 0), -> verde claro
'LAND' : ( 0, 1.0, 0.5), -> verde medio
'STEERING' : (0.5, 0, 1.0), -> violeta
'HOLD' : ( 0, 0.5, 1.0), -> azul oscuro
'ALT_HOLD' : (1.0, 0.5, 0.5), -> rojo coral
'CIRCLE' : (0.5, 1.0, 0.5), -> verde palido
'POSITION' : (1.0, 0.0, 1.0), -> magenta
'GUIDED' : (0.5, 0.5, 1.0), -> azul claro
'ACRO' : (1.0, 1.0, 0), -> amarillo
'CRUISE' : ( 0, 1.0, 1.0) -> turquesa
En la siguiente gráfica se ven dos colores. Cuando el color de fondo es verde representa el modo stabilize (en el principio de la gráfica y al final, es donde el helicoptero despega y aterriza). Cuando el color de fondo es rojo el helicoptero esta en modo ALT_HOLD. Puedes comprobrar los colores con la descripción de arriba.