Mantenimiento de altitud
En el modo de mantenimiento de altitud, el helicóptero mantiene una altura constante al tiempo que permite controlar normalmente el roll, pitch y yaw. Esta página contiene información importante sobre el uso y puesta a punto del modo ALT_HOLD.
Cuando el modo de mantenimiento de altitud (aka ALT_HOLD) es selecionado el acelerador se controla automáticamente para mantener la altitud actual. roll, pitch and yaw funcionan de la misma manera que en el modo stabilize lo que significa que el piloto controla directamente las condiciones de roll y los ángulos de pitch y el yaw.
El modo mantenimiento automática de altitud es una característica de muchos otros modos de vuelo (Loiter, Sport, etc) por lo que la información que aquí se refiere a esos modos también.
Nota : El controlador de vuelo utiliza un barómetro que mide la presión del aire como el medio principal para la determinación de la altitud ("Presión de altitud") y si la presión del aire está cambiando en su área de vuelo debido a condiciones climáticas extremas, el helicóptero seguirá el cambio de presión de aire en lugar de la altitud real (a menos que esté a menos de 20 pies del suelo y este instalado y habilitado un SONAR ). Por debajo de 26 pies, el SONAR (si está habilitado) proporcionará automáticamente el mantenimiento de altitud aún más preciso.
Controls
El piloto puede controlar la velocidad de ascenso o descenso del vehículo con el mando del acelerador.
- Si el acelerador está en el medio (40% ~ 60%) el vehículo mantendrá la altitud actual.
Verificación del rendimiento ALT_Hold con logs
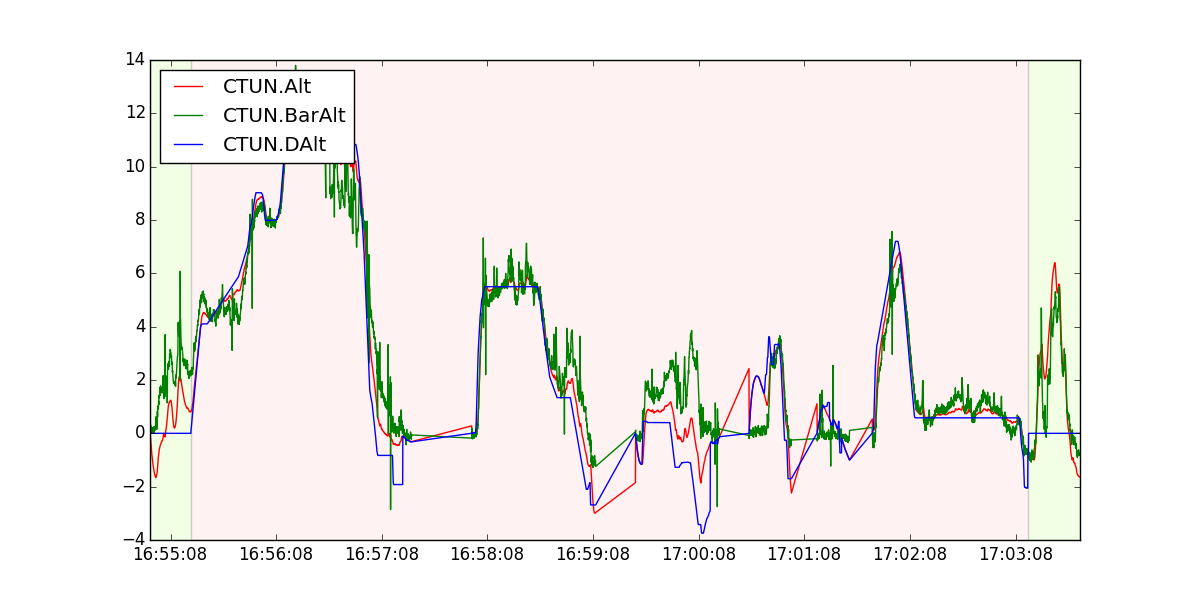
La mejor forma de ver el rendimiento del modo mantenimiento de altitud es revisar los datos de vuelo. y luego abrirlo con mavgraph y representar la altura del barómetro, la altitud deseada y estimación de la altitud en base navegación inercial. Estos doatos se encuentran de maneras distinta en los diferentes versiones de APM.
En las versiones AC3.2 se pueden encontrar los datos: CTUN’s BarAlt (altitud del barómetro), DAlt (Altitud deseada) y Alt (Altura estimada inercialmente)
Los tres se deben representar como se muestra a continuación.